 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridging the gap between learning and heuristic based pushing policies
Nov 22, 2021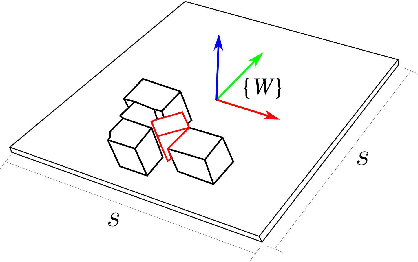
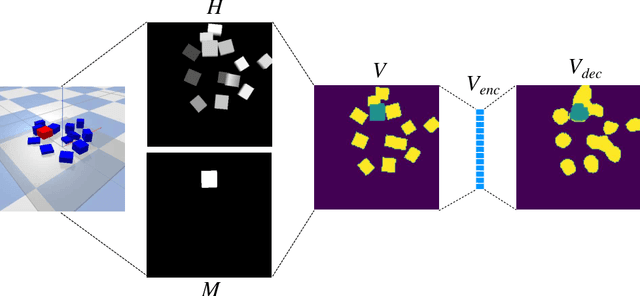
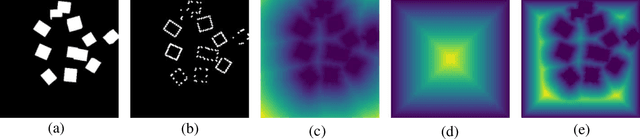
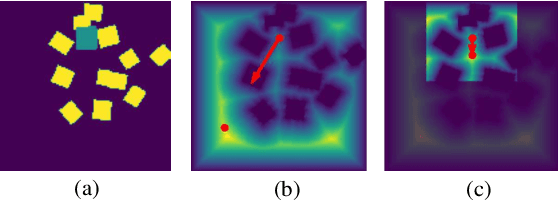
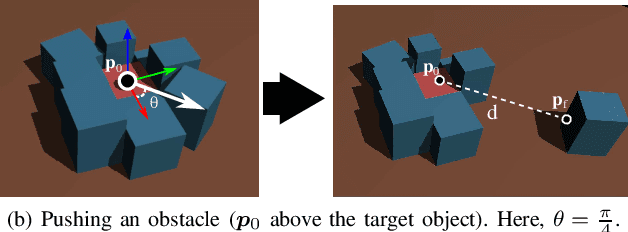
Non-prehensile pushing actions have the potential to singulate a target object from its surrounding clutter in order to facilitate the robotic grasping of the target. To address this problem we utilize a heuristic rule that moves the target object towards the workspace's empty space and demonstrate that this simple heuristic rule achieves singulation. Furthermore, we incorporate this heuristic rule to the reward in order to train more efficiently reinforcement learning (RL) agents for singulation. Simulation experiments demonstrate that this insight increases performance. Finally, our results show that the RL-based policy implicitly learns something similar to one of the used heuristics in terms of decision making.
Split Deep Q-Learning for Robust Object Singulation
Sep 17, 2019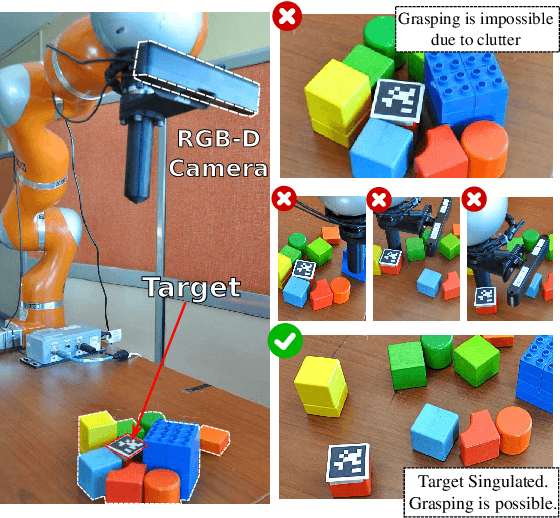
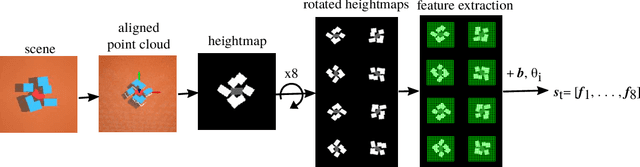
Extracting a known target object from a pile of other objects in a cluttered environment is a challenging robotic manipulation task encountered in many applications of robotics. In such conditions, the target object touches or is covered by adjacent obstacle objects, thus rendering traditional grasping techniques ineffective. In this paper, we propose a pushing policy aiming at singulating the target object from its surrounding clutter, by means of lateral pushing movements of both the neighboring objects and the target object until sufficient 'grasping room' has been achieved. To achieve the above goal we employ reinforcement learning and particularly Deep Q-learning (DQN) to learn optimal push policies by trial and error. A novel Split DQN is proposed to improve the learning rate and increase the modularity of the algorithm. Experiments show that although learning is performed in a simulated environment the transfer of learned policies to a real environment is effective thanks to robust feature selection and learning. Finally, we demonstrate that the modularity of the algorithm allows the addition of extra primitives without retraining the model from scratch.