 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Optimization for Cellular-Enabled UAV with Connectivity and Battery Constraints
Jul 30, 2023In this paper, we address the problem of path planning for a cellular-enabled UAV with connectivity and battery constraints. The UAV's mission is to deliver a payload from an initial point to a final point, while maintaining connectivity with a BS and adhering to the battery constraint. The UAV's battery can be replaced by a fully charged battery at a charging station, which takes some time. Our key contribution lies in proposing an algorithm that efficiently computes an optimal path that minimizes the mission completion time, solvable in polynomial time. We achieve this by transforming the problem into an equivalent two-level shortest path finding problem over weighted graphs and leveraging graph theoretic approaches to solve it. In more detail, we first find an optimal path and speed to travel between each pair of charging stations without replacing the battery, and then find the optimal order of visiting charging stations. To demonstrate the effectiveness of our approach, we compare it with previously proposed algorithms and show that our algorithm outperforms those in terms of both computational complexity and performance.
Anti-Jamming Games for Multi-User Multi-Band Networks
Nov 11, 2021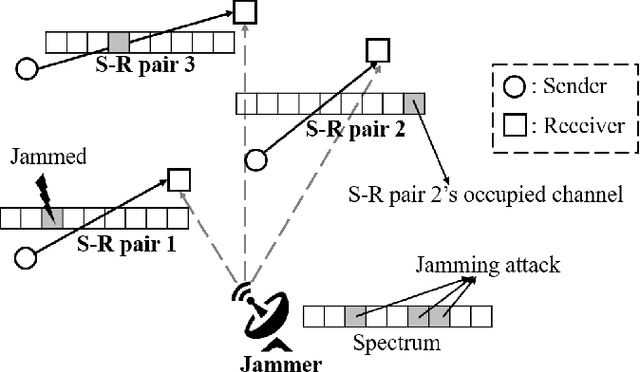
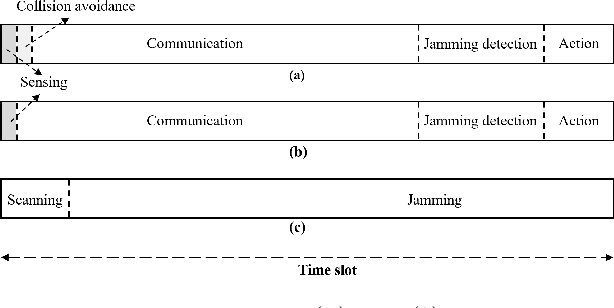
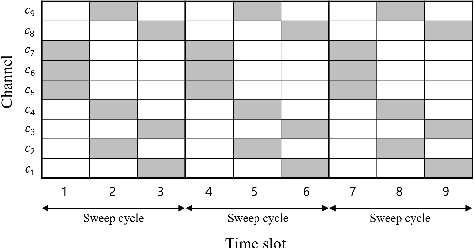
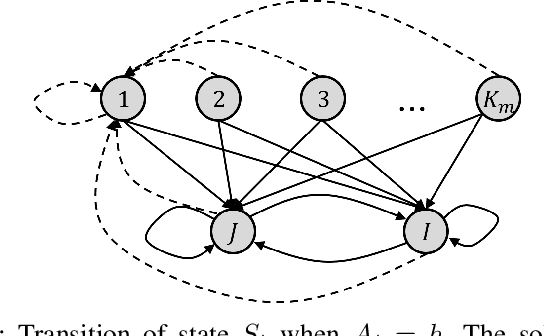
For multi-user multi-band networks, a zero-sum game between the users and the jammer is considered. In the formulation of the game, the rewards of the users are modeled with various parameters including communication rate, hopping cost, and jamming loss. It is analytically shown that for any symmetric collision avoidance protocol, a staying-threshold frequency hopping and a sweeping attack establish an equilibrium. We also propose two kinds of collision avoidance protocols to ensure that at most one user communicates in a band, and provide various numerical results that show the effect of the reward parameters and collision avoidance protocols on the optimal threshold of the staying-threshold frequency hopping and the expected rewards of the users.