 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDualProtoSeg: Simple and Efficient Design with Text- and Image-Guided Prototype Learning for Weakly Supervised Histopathology Image Segmentation
Dec 11, 2025Weakly supervised semantic segmentation (WSSS) in histopathology seeks to reduce annotation cost by learning from image-level labels, yet it remains limited by inter-class homogeneity, intra-class heterogeneity, and the region-shrinkage effect of CAM-based supervision. We propose a simple and effective prototype-driven framework that leverages vision-language alignment to improve region discovery under weak supervision. Our method integrates CoOp-style learnable prompt tuning to generate text-based prototypes and combines them with learnable image prototypes, forming a dual-modal prototype bank that captures both semantic and appearance cues. To address oversmoothing in ViT representations, we incorporate a multi-scale pyramid module that enhances spatial precision and improves localization quality. Experiments on the BCSS-WSSS benchmark show that our approach surpasses existing state-of-the-art methods, and detailed analyses demonstrate the benefits of text description diversity, context length, and the complementary behavior of text and image prototypes. These results highlight the effectiveness of jointly leveraging textual semantics and visual prototype learning for WSSS in digital pathology.
Research Impact of Solar Panel Cleaning Robot on Photovoltaic Panel's Deflection
Jun 09, 2023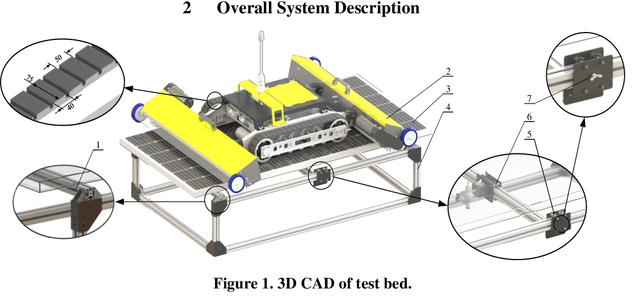

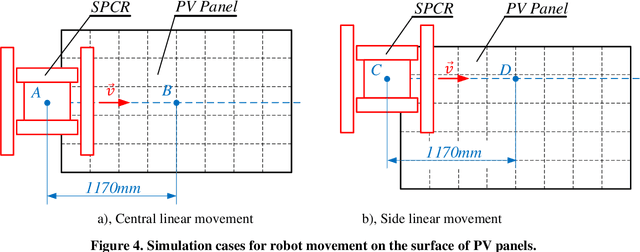
In the last few decades, solar panel cleaning robots (SPCR) have been widely used for sanitizing photovoltaic (PV) panels as an effective solution for ensuring PV efficiency. However, the dynamic load generated by the SPCR during operation might have a negative impact on PV panels. To reduce these effects, this paper presents the utilization of ANSYS software to simulate multiple scenarios involving the impact of SPCR on PV panels. The simulation scenarios provided in the paper are derived from the typical movements of SPCR observed during practical operations. The simulation results show the deformation process of PV panels, and a second-order polynomial is established to describe the deformed amplitude along the centerline of PV panels. This second-order polynomial contributes to the design process of a damper system for SPCR aiming to reduce the influence of SPCR on PV panels. Moreover, the experiments are conducted to examine the correlation between the results of the simulation and the experiment.
Design of Mobile Manipulator for Fire Extinguisher Testing. Part II: Design and Simulation
Jan 26, 2023


All flames are extinguished as early as possible, or fire services have to deal with major conflagrations. This leads to the fact that the quality of fire extinguishers has become a very sensitive and important issue in firefighting. Inspired by the development of automatic fire fighting systems, this paper presents a mobile manipulator to evaluate the power of fire extinguishers, which is designed according to the standard of fire extinguishers named as ISO 7165:2009 and ISO 11601:2008. A detailed discussion on key specifications solutions and mechanical design of the chassis of the mobile manipulator has been presented in Part I: Key Specifications and Conceptual Design. The focus of this part is on the rest of the mechanical design and controller de-sign of the mobile manipulator.
Hybrid Adaptive Control for Series Elastic Actuator of Humanoid Robot
Jan 24, 2022



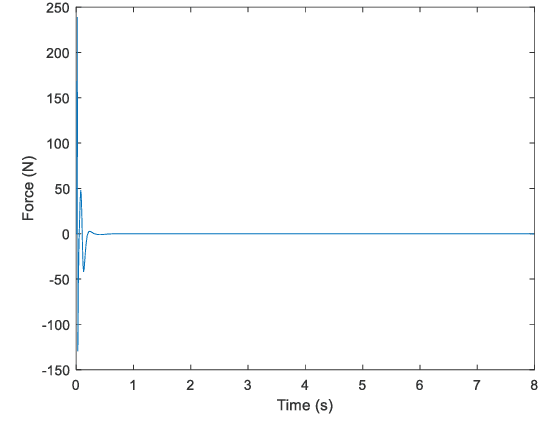
Generally, humanoid robots usually suffer significant impact force when walking or running in a non-predefined environment that could easily damage the actuators due to high stiffness. In recent years, the usages of passive, compliant series elastic actuators (SEA) for driving humanoid's joints have proved the capability in many aspects so far. However, despite being widely applied in the biped robot research field, the stable control problem for a humanoid powered by the SEAs, especially in the walking process, is still a challenge. This paper proposes a model reference adaptive control (MRAC) combined with the backstepping algorithm to deal with the parameter uncertainties in a humanoid's lower limb driven by the SEA system. This is also an extension of our previous research (Lanh et al.,2021). Firstly, a dynamic model of SEA is obtained. Secondly, since there are unknown and uncertain parameters in the SEA model, a model reference adaptive controller (MRAC) is employed to guarantee the robust performance of the humanoid's lower limb. Finally, an experiment is carried out to evaluate the effectiveness of the proposed controller and the SEA mechanism.
One-Leg Stance of Humanoid Robot using Active Balance Control
Jul 25, 2021


The task of self-balancing is one of the most important tasks when developing humanoid robots. This paper proposes a novel external balance mechanism for humanoid robot to maintain sideway balance. First, a dynamic model of the humanoid robot with balance mechanism and its simplified model are introduced. Secondly, a backstepping-based control method is utilized to split the system into two sub-systems. Then, a minimum observer-based controller is used to control the first sub-system. Since the second sub-system has unknown parameters, a model reference adaptive controller (MRAC) is used to control it. The proposed design divides the walking and balancing into two separated tasks, allowing the walking control can be executed independently of the balancing control. Furthermore, the use of the balance mechanism ensures the humanoid robot's hip movement does not exceed the threshold of a human when walking. Thus, making the overall pose of the humanoid robot looks more natural. An experiment is carried out on a commercial humanoid robot known as UXA-90 to evaluate the effectiveness of the proposed method.