 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Adaptive Control for Series Elastic Actuator of Humanoid Robot
Jan 24, 2022



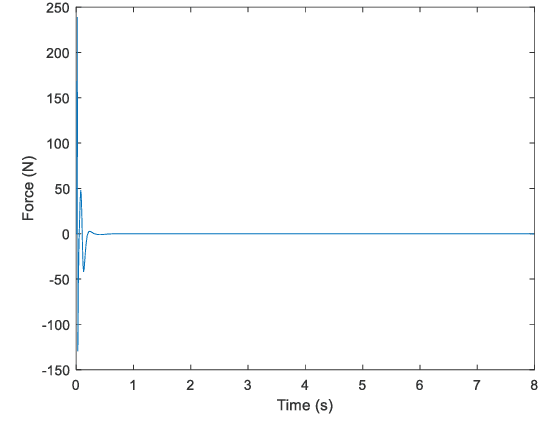
Generally, humanoid robots usually suffer significant impact force when walking or running in a non-predefined environment that could easily damage the actuators due to high stiffness. In recent years, the usages of passive, compliant series elastic actuators (SEA) for driving humanoid's joints have proved the capability in many aspects so far. However, despite being widely applied in the biped robot research field, the stable control problem for a humanoid powered by the SEAs, especially in the walking process, is still a challenge. This paper proposes a model reference adaptive control (MRAC) combined with the backstepping algorithm to deal with the parameter uncertainties in a humanoid's lower limb driven by the SEA system. This is also an extension of our previous research (Lanh et al.,2021). Firstly, a dynamic model of SEA is obtained. Secondly, since there are unknown and uncertain parameters in the SEA model, a model reference adaptive controller (MRAC) is employed to guarantee the robust performance of the humanoid's lower limb. Finally, an experiment is carried out to evaluate the effectiveness of the proposed controller and the SEA mechanism.
One-Leg Stance of Humanoid Robot using Active Balance Control
Jul 25, 2021


The task of self-balancing is one of the most important tasks when developing humanoid robots. This paper proposes a novel external balance mechanism for humanoid robot to maintain sideway balance. First, a dynamic model of the humanoid robot with balance mechanism and its simplified model are introduced. Secondly, a backstepping-based control method is utilized to split the system into two sub-systems. Then, a minimum observer-based controller is used to control the first sub-system. Since the second sub-system has unknown parameters, a model reference adaptive controller (MRAC) is used to control it. The proposed design divides the walking and balancing into two separated tasks, allowing the walking control can be executed independently of the balancing control. Furthermore, the use of the balance mechanism ensures the humanoid robot's hip movement does not exceed the threshold of a human when walking. Thus, making the overall pose of the humanoid robot looks more natural. An experiment is carried out on a commercial humanoid robot known as UXA-90 to evaluate the effectiveness of the proposed method.