 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Mobile Robot Navigation: Tracking problem
Jul 08, 2024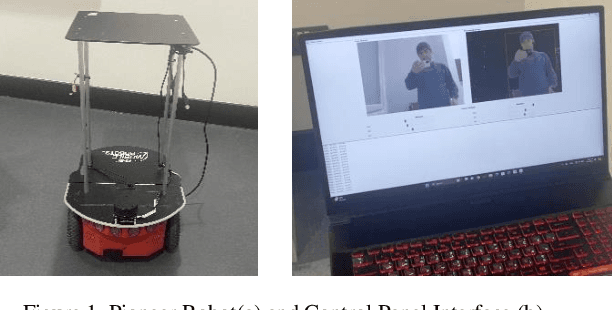
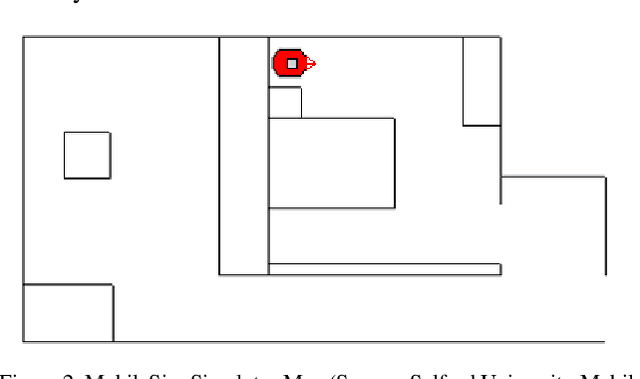
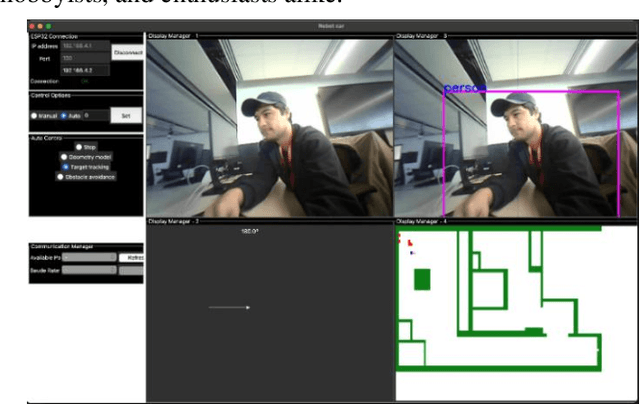
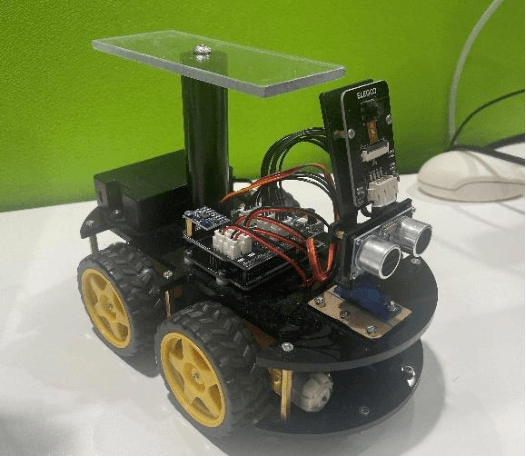
This paper presents a study on autonomous robot navigation, focusing on three key behaviors: Odometry, Target Tracking, and Obstacle Avoidance. Each behavior is described in detail, along with experimental setups for simulated and real-world environments. Odometry utilizes wheel encoder data for precise navigation along predefined paths, validated through experiments with a Pioneer robot. Target Tracking employs vision-based techniques for pursuing designated targets while avoiding obstacles, demonstrated on the same platform. Obstacle Avoidance utilizes ultrasonic sensors to navigate cluttered environments safely, validated in both simulated and real-world scenarios. Additionally, the paper extends the project to include an Elegoo robot car, leveraging its features for enhanced experimentation. Through advanced algorithms and experimental validations, this study provides insights into developing robust navigation systems for autonomous robots.