 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNEAT and HyperNEAT based Design for Soft Actuator Controllers
Jun 05, 2025Since soft robotics are composed of compliant materials, they perform better than conventional rigid robotics in specific fields, such as medical applications. However, the field of soft robotics is fairly new, and the design process of their morphology and their controller strategies has not yet been thoroughly studied. Consequently, here, an automated design method for the controller of soft actuators based on Neuroevolution is proposed. Specifically, the suggested techniques employ Neuroevolution of Augmenting Topologies (NEAT) and Hypercube-based NEAT (HyperNEAT) to generate the synchronization profile of the components of a simulated soft actuator by employing Compositional Pattern Producing Networks (CPPNs). As a baseline methodology, a Standard Genetic Algorithm (SGA) was used. Moreover, to test the robustness of the proposed methodologies, both high- and low-performing morphologies of soft actuators were utilized as testbeds. Moreover, the use of an affluent and a more limited set of activation functions for the Neuroevolution targets was tested throughout the experiments. The results support the hypothesis that Neuroevolution based methodologies are more appropriate for designing controllers that align with both types of morphologies. In specific, NEAT performed better for all different scenarios tested and produced more simplistic networks that are easier to implement in real life applications.
Designing morphologies of soft medical devices using cooperative neuro coevolution
Jun 04, 2025Soft robots have proven to outperform traditional robots in applications related to propagation in geometrically constrained environments. Designing these robots and their controllers is an intricate task, since their building materials exhibit non-linear properties. Human designs may be biased; hence, alternative designing processes should be considered. We present a cooperative neuro coevolution approach to designing the morphologies of soft actuators and their controllers for applications in drug delivery apparatus. Morphologies and controllers are encoded as compositional pattern-producing networks evolved by Neuroevolution of Augmented Topologies (NEAT) and in cooperative coevolution methodology, taking into account different collaboration methods. Four collaboration methods are studied: n best individuals, n worst individuals, n best and worst individuals, and n random individuals. As a performance baseline, the results from the implementation of Age-Fitness Pareto Optimisation (AFPO) are considered. The metrics used are the maximum displacement in upward bending and the robustness of the devices in terms of applying to the same evolved morphology a diverse set of controllers. Results suggest that the cooperative neuro coevolution approach can produce more suitable morphologies for the intended devices than AFPO.
Control of Biohybrid Actuators using NeuroEvolution
Nov 13, 2024In medical-related tasks, soft robots can perform better than conventional robots because of their compliant building materials and the movements they are able perform. However, designing soft robot controllers is not an easy task, due to the non-linear properties of their materials. Since human expertise to design such controllers is yet not sufficiently effective, a formal design process is needed. The present research proposes neuroevolution-based algorithms as the core mechanism to automatically generate controllers for biohybrid actuators that can be used on future medical devices, such as a catheter that will deliver drugs. The controllers generated by methodologies based on Neuroevolution of Augmenting Topologies (NEAT) and Hypercube-based NEAT (HyperNEAT) are compared against the ones generated by a standard genetic algorithm (SGA). In specific, the metrics considered are the maximum displacement in upward bending movement and the robustness to control different biohybrid actuator morphologies without redesigning the control strategy. Results indicate that the neuroevolution-based algorithms produce better suited controllers than the SGA. In particular, NEAT designed the best controllers, achieving up to 25% higher displacement when compared with SGA-produced specialised controllers trained over a single morphology and 23% when compared with general purpose controllers trained over a set of morphologies.
Using neuroevolution for designing soft medical devices
Aug 17, 2024Soft robots can exhibit better performance in specific tasks compared to conventional robots, particularly in healthcare-related tasks. However, the field of soft robotics is still young, and designing them often involves mimicking natural organisms or relying heavily on human experts' creativity. A formal automated design process is required. We propose the use of neuroevolution-based algorithms to automatically design initial sketches of soft actuators that can enable the movement of future medical devices, such as drug-delivering catheters. The actuator morphologies discovered by algorithms like Age-Fitness Pareto Optimization, NeuroEvolution of Augmenting Topologies (NEAT), and Hypercube-based NEAT (HyperNEAT) were compared based on the maximum displacement reached and their robustness against various control methods. Analyzing the results granted the insight that neuroevolution-based algorithms produce better-performing and more robust actuators under different control methods. Moreover, the best-performing morphologies were discovered by the NEAT algorithm. As a future work aspect, we propose using the morphologies discovered here as test beds to optimize specialized controllers, enabling more effective functionality towards the desired deflections of the suggested soft catheters.
NeuroEvolution algorithms applied in the designing process of biohybrid actuators
Aug 14, 2024Soft robots diverge from traditional rigid robotics, offering unique advantages in adaptability, safety, and human-robot interaction. In some cases, soft robots can be powered by biohybrid actuators and the design process of these systems is far from straightforward. We analyse here two algorithms that may assist the design of these systems, namely, NEAT (NeuroEvolution of Augmented Topologies) and HyperNEAT (Hypercube-based NeuroEvolution of Augmented Topologies). These algorithms exploit the evolution of the structure of actuators encoded through neural networks. To evaluate these algorithms, we compare them with a similar approach using the Age Fitness Pareto Optimization (AFPO) algorithm, with a focus on assessing the maximum displacement achieved by the discovered biohybrid morphologies. Additionally, we investigate the effects of optimization against both the volume of these morphologies and the distance they can cover. To further accelerate the computational process, the proposed methodology is implemented in a client-server setting; so, the most demanding calculations can be executed on specialized and efficient hardware. The results indicate that the HyperNEAT-based approach excels in identifying morphologies with minimal volumes that still achieve satisfactory displacement targets.
Using coevolution and substitution of the fittest for health and well-being recommender systems
Nov 01, 2022This research explores substitution of the fittest (SF), a technique designed to counteract the problem of disengagement in two-population competitive coevolutionary genetic algorithms. SF is domain-independent and requires no calibration. We first perform a controlled comparative evaluation of SF's ability to maintain engagement and discover optimal solutions in a minimal toy domain. Experimental results demonstrate that SF is able to maintain engagement better than other techniques in the literature. We then address the more complex real-world problem of evolving recommendations for health and well-being. We introduce a coevolutionary extension of EvoRecSys, a previously published evolutionary recommender system. We demonstrate that SF is able to maintain engagement better than other techniques in the literature, and the resultant recommendations using SF are higher quality and more diverse than those produced by EvoRecSys.
Substitution of the Fittest: A Novel Approach for Mitigating Disengagement in Coevolutionary Genetic Algorithms
Aug 06, 2021
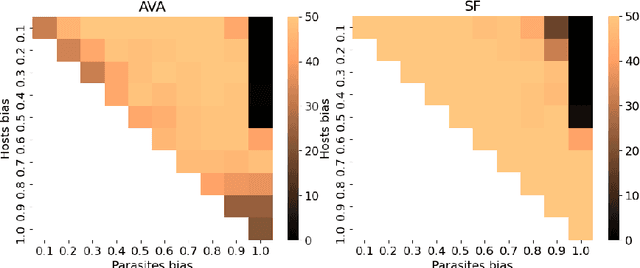
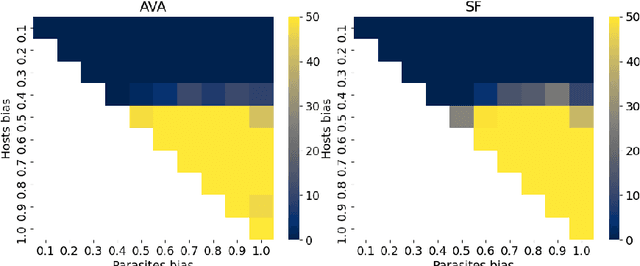
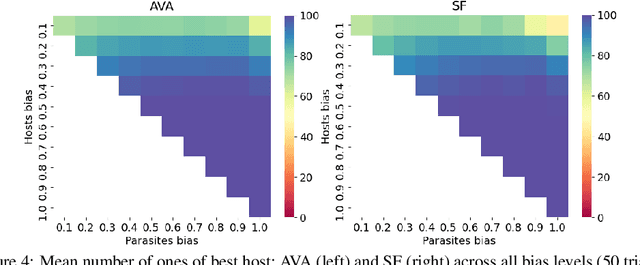
We propose substitution of the fittest (SF), a novel technique designed to counteract the problem of disengagement in two-population competitive coevolutionary genetic algorithms. The approach presented is domain-independent and requires no calibration. In a minimal domain, we perform a controlled evaluation of the ability to maintain engagement and the capacity to discover optimal solutions. Results demonstrate that the solution discovery performance of SF is comparable with other techniques in the literature, while SF also offers benefits including a greater ability to maintain engagement and a much simpler mechanism.