 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTiny Graph Neural Networks for Radio Resource Management
Mar 28, 2024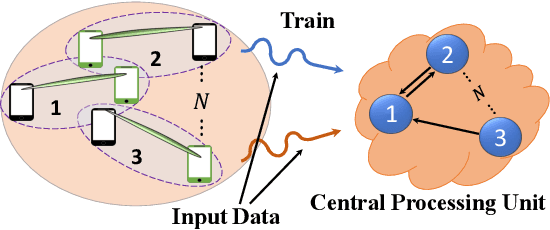
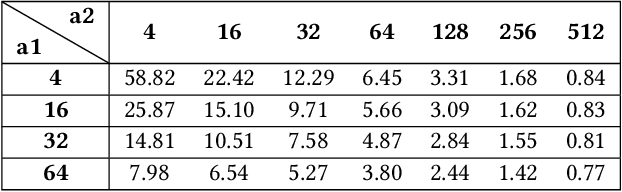
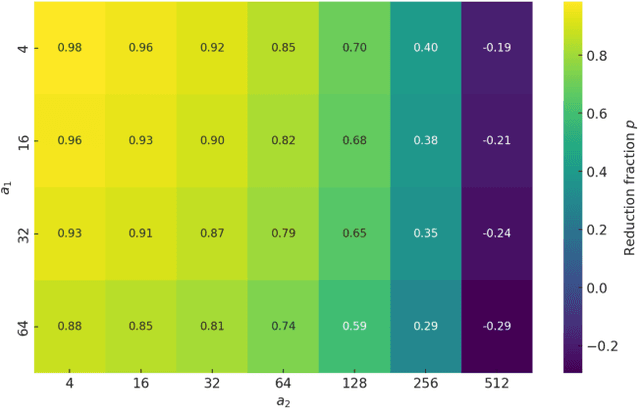
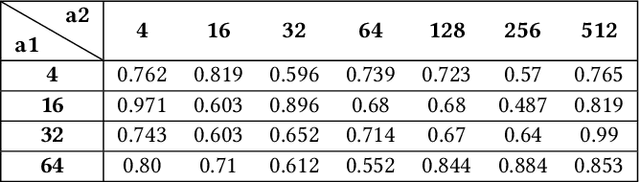
The surge in demand for efficient radio resource management has necessitated the development of sophisticated yet compact neural network architectures. In this paper, we introduce a novel approach to Graph Neural Networks (GNNs) tailored for radio resource management by presenting a new architecture: the Low Rank Message Passing Graph Neural Network (LR-MPGNN). The cornerstone of LR-MPGNN is the implementation of a low-rank approximation technique that substitutes the conventional linear layers with their low-rank counterparts. This innovative design significantly reduces the model size and the number of parameters. We evaluate the performance of the proposed LR-MPGNN model based on several key metrics: model size, number of parameters, weighted sum rate of the communication system, and the distribution of eigenvalues of weight matrices. Our extensive evaluations demonstrate that the LR-MPGNN model achieves a sixtyfold decrease in model size, and the number of model parameters can be reduced by up to 98%. Performance-wise, the LR-MPGNN demonstrates robustness with a marginal 2% reduction in the best-case scenario in the normalized weighted sum rate compared to the original MPGNN model. Additionally, the distribution of eigenvalues of the weight matrices in the LR-MPGNN model is more uniform and spans a wider range, suggesting a strategic redistribution of weights.
A Search and Detection Autonomous Drone System: from Design to Implementation
Nov 29, 2022Utilizing autonomous drones or unmanned aerial vehicles (UAVs) has shown great advantages over preceding methods in support of urgent scenarios such as search and rescue (SAR) and wildfire detection. In these operations, search efficiency in terms of the amount of time spent to find the target is crucial since with the passing of time the survivability of the missing person decreases or wildfire management becomes more difficult with disastrous consequences. In this work, it is considered a scenario where a drone is intended to search and detect a missing person (e.g., a hiker or a mountaineer) or a potential fire spot in a given area. In order to obtain the shortest path to the target, a general framework is provided to model the problem of target detection when the target's location is probabilistically known. To this end, two algorithms are proposed: Path planning and target detection. The path planning algorithm is based on Bayesian inference and the target detection is accomplished by means of a residual neural network (ResNet) trained on the image dataset captured by the drone as well as existing pictures and datasets on the web. Through simulation and experiment, the proposed path planning algorithm is compared with two benchmark algorithms. It is shown that the proposed algorithm significantly decreases the average time of the mission.