 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSuperpixel Perception Graph Neural Network for Intelligent Defect Detection
Oct 14, 2022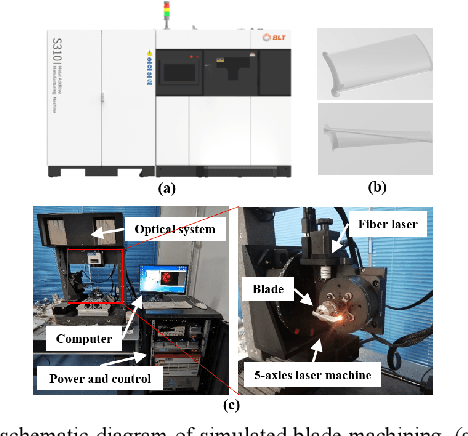
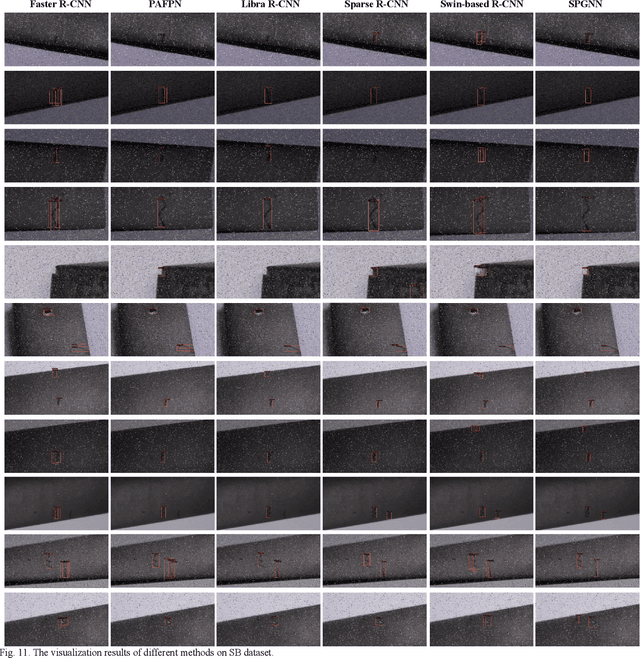
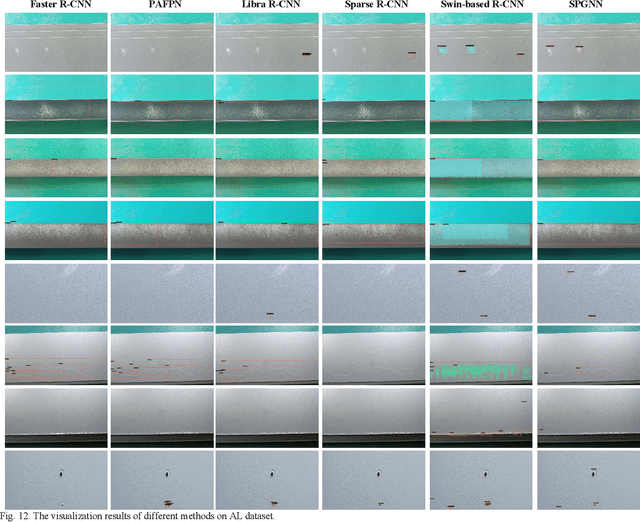
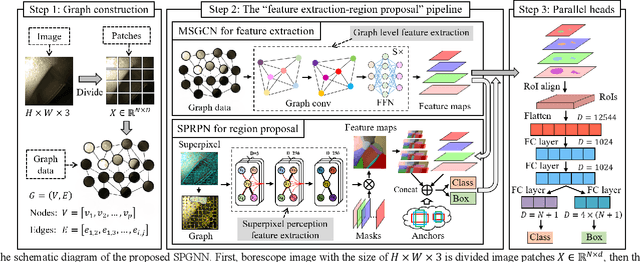
Aero-engine is the core component of aircraft and other spacecraft. The high-speed rotating blades provide power by sucking in air and fully combusting, and various defects will inevitably occur, threatening the operation safety of aero-engine. Therefore, regular inspections are essential for such a complex system. However, existing traditional technology which is borescope inspection is labor-intensive, time-consuming, and experience-dependent. To endow this technology with intelligence, a novel superpixel perception graph neural network (SPGNN) is proposed by utilizing a multi-stage graph convolutional network (MSGCN) for feature extraction and superpixel perception region proposal network (SPRPN) for region proposal. First, to capture complex and irregular textures, the images are transformed into a series of patches, to obtain their graph representations. Then, MSGCN composed of several GCN blocks extracts graph structure features and performs graph information processing at graph level. Last but not least, the SPRPN is proposed to generate perceptual bounding boxes by fusing graph representation features and superpixel perception features. Therefore, the proposed SPGNN always implements feature extraction and information transmission at the graph level in the whole SPGNN pipeline, and SPRPN and MSGNN mutually benefit from each other. To verify the effectiveness of SPGNN, we meticulously construct a simulated blade dataset with 3000 images. A public aluminum dataset is also used to validate the performances of different methods. The experimental results demonstrate that the proposed SPGNN has superior performance compared with the state-of-the-art methods. The source code will be available at https://github.com/githbshang/SPGNN.