 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApplication of linear regression method to the deep reinforcement learning in continuous action cases
Mar 21, 2025

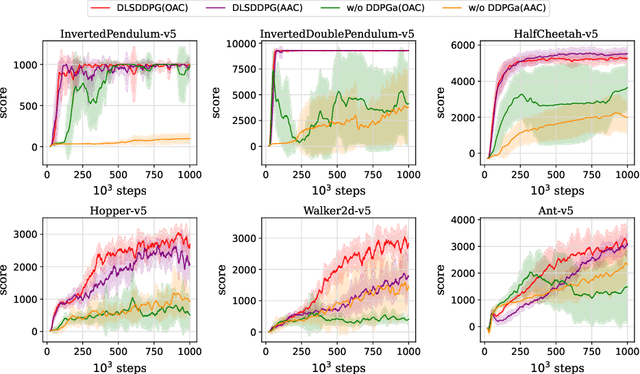

The linear regression (LR) method offers the advantage that optimal parameters can be calculated relatively easily, although its representation capability is limited than that of the deep learning technique. To improve deep reinforcement learning, the Least Squares Deep Q Network (LS-DQN) method was proposed by Levine et al., which combines Deep Q Network (DQN) with LR method. However, the LS-DQN method assumes that the actions are discrete. In this study, we propose the Double Least Squares Deep Deterministic Policy Gradient (DLS-DDPG) method to address this limitation. This method combines the LR method with the Deep Deterministic Policy Gradient (DDPG) technique, one of the representative deep reinforcement learning algorithms for continuous action cases. Numerical experiments conducted in MuJoCo environments showed that the LR update improved performance at least in some tasks, although there are difficulties such as the inability to make the regularization terms small.
Multi-agent reinforcement learning using echo-state network and its application to pedestrian dynamics
Dec 19, 2023In recent years, simulations of pedestrians using the multi-agent reinforcement learning (MARL) have been studied. This study considered the roads on a grid-world environment, and implemented pedestrians as MARL agents using an echo-state network and the least squares policy iteration method. Under this environment, the ability of these agents to learn to move forward by avoiding other agents was investigated. Specifically, we considered two types of tasks: the choice between a narrow direct route and a broad detour, and the bidirectional pedestrian flow in a corridor. The simulations results indicated that the learning was successful when the density of the agents was not that high.