 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThrough the Looking Glass: Diminishing Occlusions in Robot Vision Systems with Mirror Reflections
Aug 31, 2021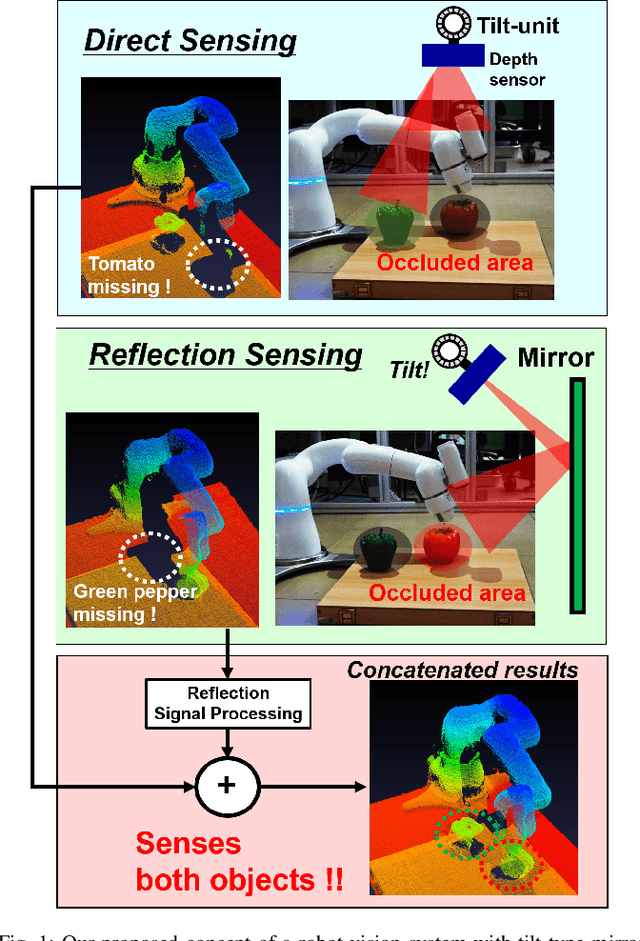
The quality of robot vision greatly affects the performance of automation systems, where occlusions stand as one of the biggest challenges. If the target is occluded from the sensor, detecting and grasping such objects become very challenging. For example, when multiple robot arms cooperate in a single workplace, occlusions will be created under the robot arm itself and hide objects underneath. While occlusions can be greatly reduced by installing multiple sensors, the increase in sensor costs cannot be ignored. Moreover, the sensor placements must be rearranged every time the robot operation routine and layout change. To diminish occlusions, we propose the first robot vision system with tilt-type mirror reflection sensing. By instantly tilting the sensor itself, we obtain two sensing results with different views: conventional direct line-of-sight sensing and non-line-of-sight sensing via mirror reflections. Our proposed system removes occlusions adaptively by detecting the occlusions in the scene and dynamically configuring the sensor tilt angle to sense the detected occluded area. Thus, sensor rearrangements are not required even after changes in robot operation or layout. Since the required hardware is the tilt-unit and a commercially available mirror, the cost increase is marginal. Through experiments, we show that our system can achieve a similar detection accuracy as systems with multiple sensors, regardless of the single-sensor implementation.