 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBi-capacity Choquet Integral for Sensor Fusion with Label Uncertainty
Sep 05, 2024
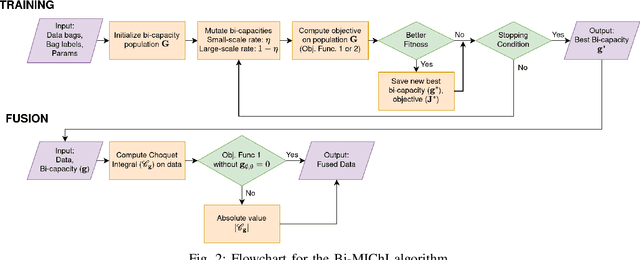


Sensor fusion combines data from multiple sensor sources to improve reliability, robustness, and accuracy of data interpretation. The Fuzzy Integral (FI), in particular, the Choquet integral (ChI), is often used as a powerful nonlinear aggregator for fusion across multiple sensors. However, existing supervised ChI learning algorithms typically require precise training labels for each input data point, which can be difficult or impossible to obtain. Additionally, prior work on ChI fusion is often based only on the normalized fuzzy measures, which bounds the fuzzy measure values between [0, 1]. This can be limiting in cases where the underlying scales of input data sources are bipolar (i.e., between [-1, 1]). To address these challenges, this paper proposes a novel Choquet integral-based fusion framework, named Bi-MIChI (pronounced "bi-mi-kee"), which uses bi-capacities to represent the interactions between pairs of subsets of the input sensor sources on a bi-polar scale. This allows for extended non-linear interactions between the sensor sources and can lead to interesting fusion results. Bi-MIChI also addresses label uncertainty through Multiple Instance Learning, where training labels are applied to "bags" (sets) of data instead of per-instance. Our proposed Bi-MIChI framework shows effective classification and detection performance on both synthetic and real-world experiments for sensor fusion with label uncertainty. We also provide detailed analyses on the behavior of the fuzzy measures to demonstrate our fusion process.
Efficient Multi-Resolution Fusion for Remote Sensing Data with Label Uncertainty
Feb 07, 2024Multi-modal sensor data fusion takes advantage of complementary or reinforcing information from each sensor and can boost overall performance in applications such as scene classification and target detection. This paper presents a new method for fusing multi-modal and multi-resolution remote sensor data without requiring pixel-level training labels, which can be difficult to obtain. Previously, we developed a Multiple Instance Multi-Resolution Fusion (MIMRF) framework that addresses label uncertainty for fusion, but it can be slow to train due to the large search space for the fuzzy measures used to integrate sensor data sources. We propose a new method based on binary fuzzy measures, which reduces the search space and significantly improves the efficiency of the MIMRF framework. We present experimental results on synthetic data and a real-world remote sensing detection task and show that the proposed MIMRF-BFM algorithm can effectively and efficiently perform multi-resolution fusion given remote sensing data with uncertainty.