 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comprehensive Survey of PID and Pure Pursuit Control Algorithms for Autonomous Vehicle Navigation
Sep 15, 2024The autonomous driving industry is experiencing unprecedented growth, driven by rapid advancements in technology and increasing demand for safer, more efficient transportation. At the heart of this revolution are two critical factors: lateral and longitudinal controls, which together enable vehicles to track complex environments with high accuracy and minimal errors. This paper provides a detailed overview of two of the field's most commonly used and stable control algorithms: proportional-integral-derivative (PID) and pure pursuit. These algorithms have proved useful in solving the issues of lateral (steering) and longitudinal (speed and distance) control in autonomous vehicles. This survey aims to provide researchers, engineers, and industry professionals with an in depth understanding of these fundamental control algorithms, their current applications, and their potential to shape the future of autonomous driving technology.
A Sui Generis QA Approach using RoBERTa for Adverse Drug Event Identification
Oct 30, 2020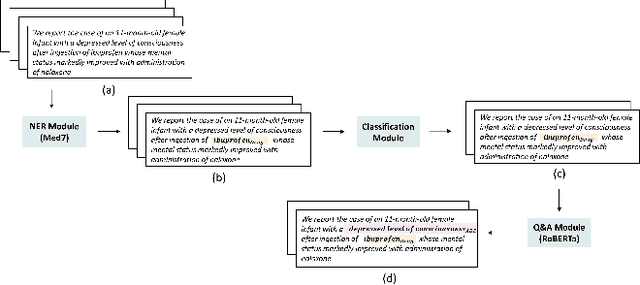
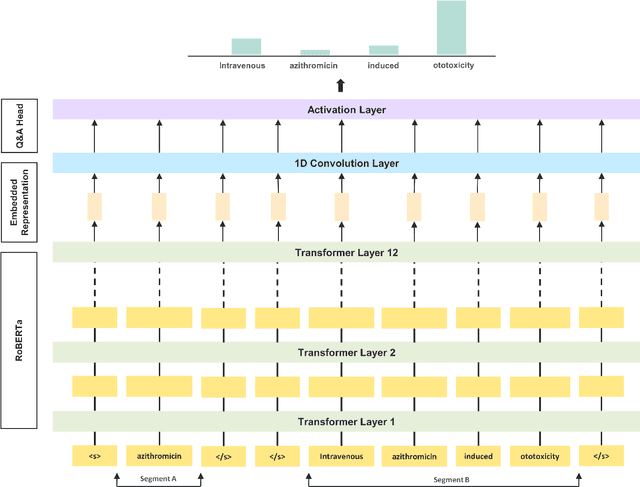
Extraction of adverse drug events from biomedical literature and other textual data is an important component to monitor drug-safety and this has attracted attention of many researchers in healthcare. Existing works are more pivoted around entity-relation extraction using bidirectional long short term memory networks (Bi-LSTM) which does not attain the best feature representations. In this paper, we introduce a question answering framework that exploits the robustness, masking and dynamic attention capabilities of RoBERTa by a technique of domain adaptation and attempt to overcome the aforementioned limitations. Our model outperforms the prior work by 9.53% F1-Score.