 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Ducted Fan UAV for Safe Aerial Grabbing and Transfer of Multiple Loads Using Electromagnets
Sep 24, 2024In recent years, research on aerial grasping, manipulation, and transportation of objects has garnered significant attention. These tasks often require UAVs to operate safely close to environments or objects and to efficiently grasp payloads. However, current widely adopted flying platforms pose safety hazards: unprotected high-speed rotating propellers can cause harm to the surroundings. Additionally, the space for carrying payloads on the fuselage is limited, and the restricted position of the payload also hinders efficient grasping. To address these issues, this paper presents a coaxial ducted fan UAV which is equipped with electromagnets mounted externally on the fuselage, enabling safe grasping and transfer of multiple loads in midair without complex additional actuators. It also has the capability to achieve direct human-UAV cargo transfer in the air. The forces acting on the loads during magnetic attachment and their influencing factors were analyzed. An ADRC controller is utilized to counteract disturbances during grasping and achieve attitude control. Finally, flight tests are conducted to verify the UAV's ability to directly grasp multiple loads from human hands in flight while maintaining attitude tracking.
Extended Preintegration for Relative State Estimation of Leader-Follower Platform
Aug 15, 2023



Relative state estimation using exteroceptive sensors suffers from limitations of the field of view (FOV) and false detection, that the proprioceptive sensor (IMU) data are usually engaged to compensate. Recently ego-motion constraint obtained by Inertial measurement unit (IMU) preintegration has been extensively used in simultaneous localization and mapping (SLAM) to alleviate the computation burden. This paper introduces an extended preintegration incorporating the IMU preintegration of two platforms to formulate the motion constraint of relative state. One merit of this analytic constraint is that it can be seamlessly integrated into the unified graph optimization framework to implement the relative state estimation in a high-performance real-time tracking thread, another point is a full smoother design with this precise constraint to optimize the 3D coordinate and refine the state for the refinement thread. We compare extensively in simulations the proposed algorithms with two existing approaches to confirm our outperformance. In the real virtual reality (VR) application design with the proposed estimator, we properly realize the visual tracking of the six degrees of freedom (6DoF) controller suitable for almost all scenarios, including the challenging environment with missing features, light mutation, dynamic scenes, etc. The demo video is at https://www.youtube.com/watch?v=0idb9Ls2iAM. For the benefit of the community, we make the source code public.
Tightly Coupled Optimization-based GPS-Visual-Inertial Odometry with Online Calibration and Initialization
Mar 05, 2022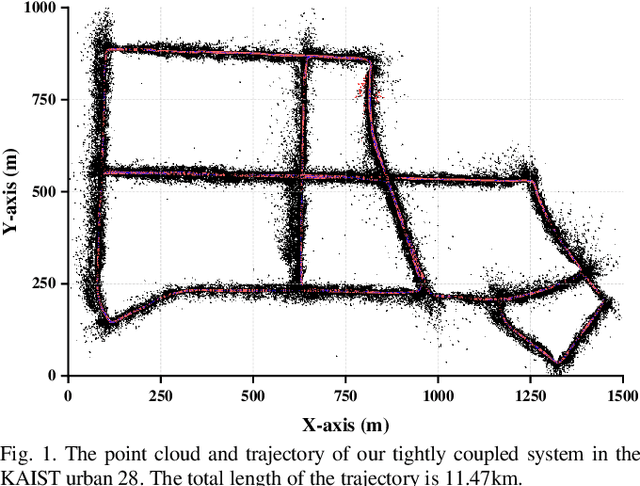
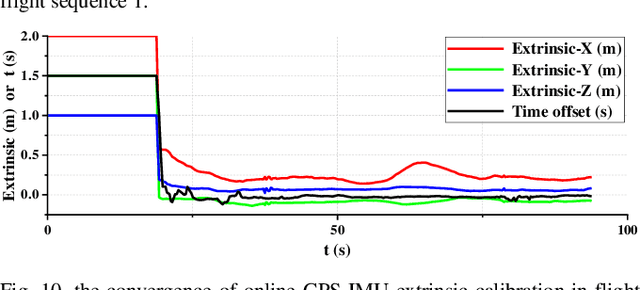
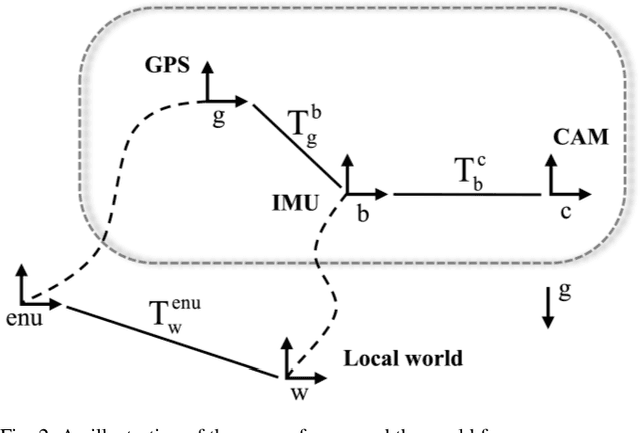
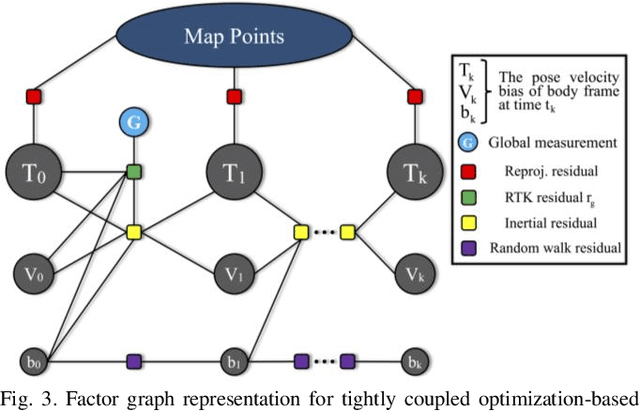
In this paper, we present a tightly coupled optimization-based GPS-Visual-Inertial odometry system to solve the trajectory drift of the visual-inertial odometry especially over long-term runs. Visual reprojection residuals, IMU residuals, and GPS measurement residuals are jointly minimized within a local bundle adjustment, in which we apply GPS measurements and IMU preintegration used for the IMU residuals to formulate a novel GPS residual. To improve the efficiency and robustness of the system, we propose a fast reference frames initialization method and an online calibration method for GPS-IMU extrinsic and time offset. In addition, we further test the performance and convergence of our online calibration method. Experimental results on EuRoC datasets show that our method consistently outperforms other tightly coupled and loosely coupled approaches. Meanwhile, this system has been validated on KAIST datasets, which proves that our system can work well in the case of visual or GPS failure.