 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Resource Allocation with Multi-Agent Deep Reinforcement Learning for 5G-V2V Communication
Oct 11, 2020We consider the distributed resource selection problem in Vehicle-to-vehicle (V2V) communication in the absence of a base station. Each vehicle autonomously selects transmission resources from a pool of shared resources to disseminate Cooperative Awareness Messages (CAMs). This is a consensus problem where each vehicle has to select a unique resource. The problem becomes more challenging when---due to mobility---the number of vehicles in vicinity of each other is changing dynamically. In a congested scenario, allocation of unique resources for each vehicle becomes infeasible and a congested resource allocation strategy has to be developed. The standardized approach in 5G, namely semi-persistent scheduling (SPS) suffers from effects caused by spatial distribution of the vehicles. In our approach, we turn this into an advantage. We propose a novel DIstributed Resource Allocation mechanism using multi-agent reinforcement Learning (DIRAL) which builds on a unique state representation. One challenging issue is to cope with the non-stationarity introduced by concurrently learning agents which causes convergence problems in multi-agent learning systems. We aimed to tackle non-stationarity with unique state representation. Specifically, we deploy view-based positional distribution as a state representation to tackle non-stationarity and perform complex joint behavior in a distributed fashion. Our results showed that DIRAL improves PRR by 20% compared to SPS in challenging congested scenarios.
Veni Vidi Dixi: Reliable Wireless Communication with Depth Images
Dec 04, 2019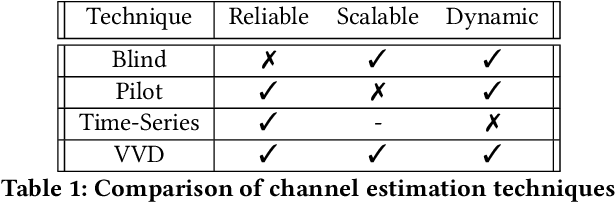
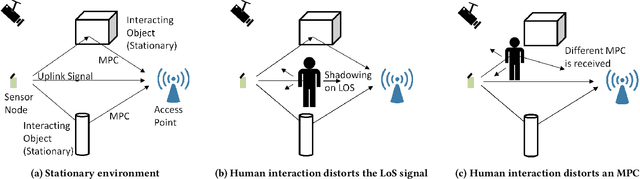
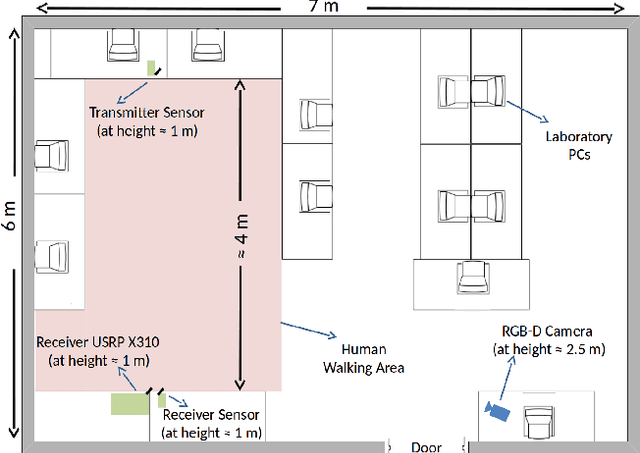
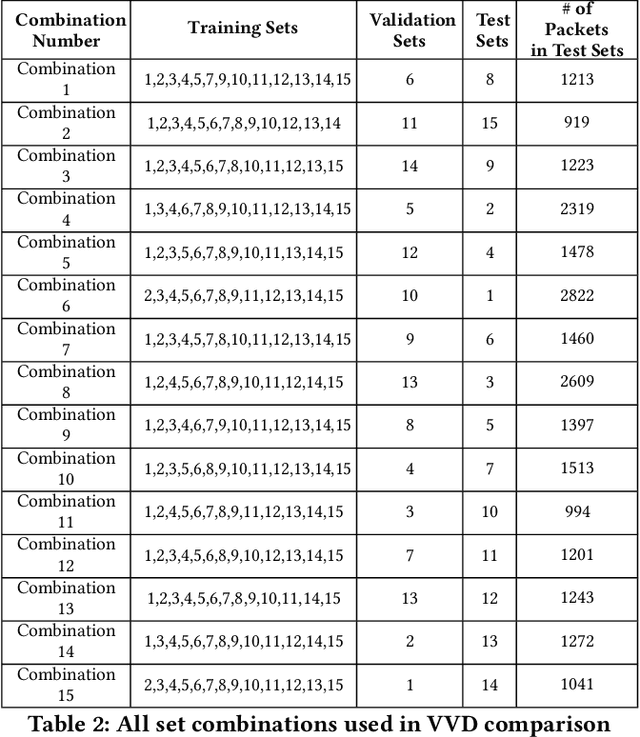
The upcoming industrial revolution requires deployment of critical wireless sensor networks for automation and monitoring purposes. However, the reliability of the wireless communication is rendered unpredictable by mobile elements in the communication environment such as humans or mobile robots which lead to dynamically changing radio environments. Changes in the wireless channel can be monitored with frequent pilot transmission. However, that would stress the battery life of sensors. In this work a new wireless channel estimation technique, Veni Vidi Dixi, VVD, is proposed. VVD leverages the redundant information in depth images obtained from the surveillance cameras in the communication environment and utilizes Convolutional Neural Networks CNNs to map the depth images of the communication environment to complex wireless channel estimations. VVD increases the wireless communication reliability without the need for frequent pilot transmission and with no additional complexity on the receiver. The proposed method is tested by conducting measurements in an indoor environment with a single mobile human. Up to authors best knowledge our work is the first to obtain complex wireless channel estimation from only depth images without any pilot transmission. The collected wireless trace, depth images and codes are publicly available.