Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Ergonomic Interaction Workspace Analysis Method for the Optimal Design of a Surgical Master Manipulator
May 15, 2021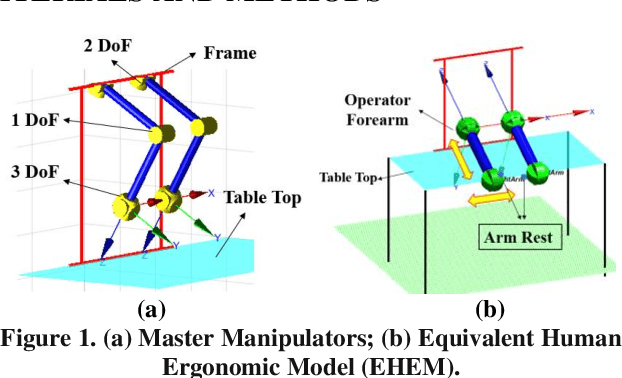
Master control console is a place where robots collaborate with humans in a shared environment. To this end, ergonomics is an important aspect to be considered. With ergonomic design, the surgeons can feel more comfortable to conduct the surgical tasks with higher efficiency, and the quality of the teleoperated robotic surgery can be improved. In this paper, an Ergonomic Interaction Workspace Analysis method is proposed to optimize master manipulators and fulfil ergonomics consideration for designing a master manipulator for teleoperated robotic surgery.
* Accepted by the Hamlyn Symposium on Medical Robotics
Via