 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Gait Phase and Task Estimation for Controlling a Powered Ankle Exoskeleton on Extremely Uneven Terrain
May 06, 2022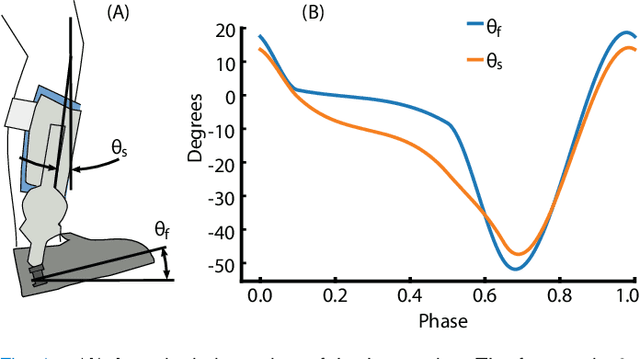
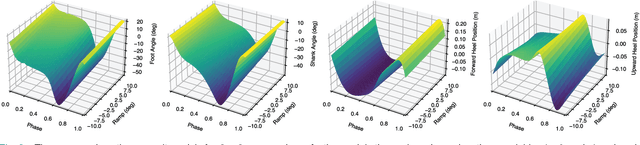
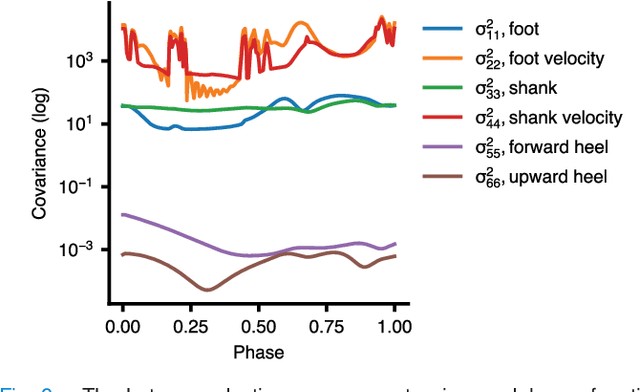
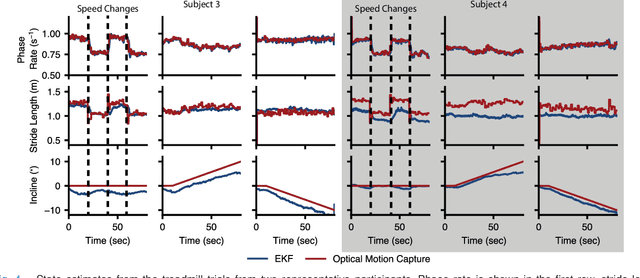
Positive biomechanical outcomes have been reported with lower-limb exoskeletons in laboratory settings, but these devices have difficulty delivering appropriate assistance in synchrony with human gait as the task or rate of phase progression change in real-world environments. This paper presents a torque controller for an ankle exoskeleton that uses state estimation with a data-driven kinematic model to continuously estimate the phase, phase rate, stride length, and ramp parameters during locomotion. The controller applies torque assistance based on the estimated phase and adapts the torque profile based on the estimated task variables to match human torques observed in a multi-activity database of 10 able-bodied subjects. We demonstrate in silico that the controller yields phase estimates that are more accurate than state of the art, while also estimating task variables with comparable accuracy to recent machine learning approaches. The controller implemented in an ankle exoskeleton successfully adapts its assistance in response to changing phase and task variables, both during controlled treadmill trials (6 able-bodied subjects) and a real-world stress test with extremely uneven terrain.
Compliance Shaping for Control of Strength Amplification Exoskeletons with Elastic Cuffs
Mar 22, 2019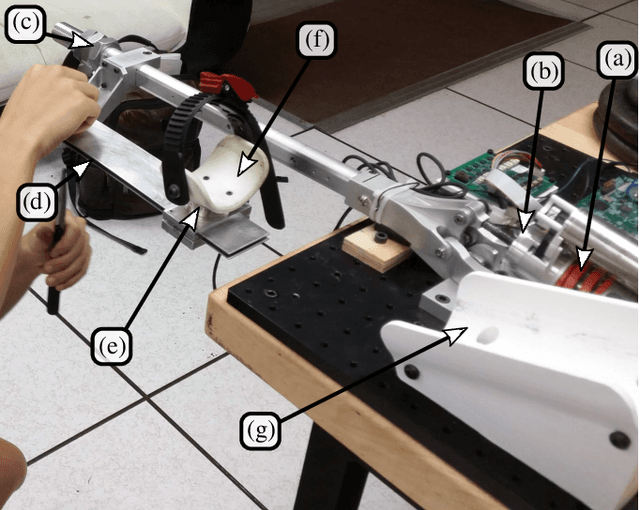
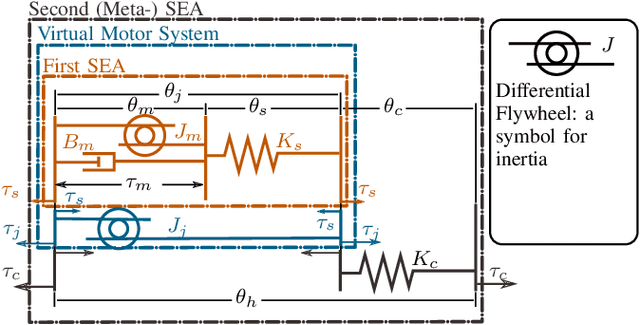
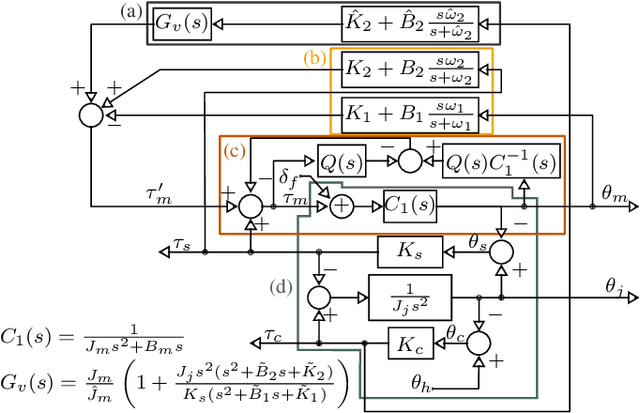
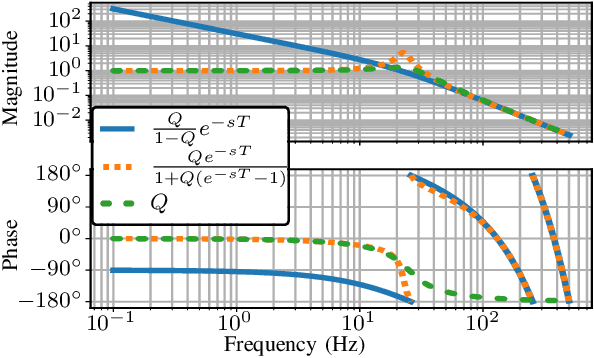
Exoskeletons which amplify the strength of their operators can enable heavy-duty manipulation of unknown objects. However, this type of behavior is difficult to accomplish; it requires the exoskeleton to sense and amplify the operator's interaction forces while remaining stable. But, the goals of amplification and robust stability when connected to the operator fundamentally conflict. As a solution, we introduce a design with a spring in series with the force sensitive cuff. This allows us to design an exoskeleton compliance behavior which is nominally passive, even with high amplification ratios. In practice, time delay and discrete time filters prevent our strategy from actually achieving passivity, but the designed compliance still makes the exoskeleton more robust to spring-like human behaviors. Our exoskeleton is actuated by a series elastic actuator (SEA), which introduces another spring into the system. We show that shaping the cuff compliance for the exoskeleton can be made into approximately the same problem as shaping the spring compliance of an SEA. We therefore introduce a feedback controller and gain tuning method which takes advantage of an existing compliance shaping technique for SEAs. We call our strategy the "double compliance shaping" method. With large amplification ratios, this controller tends to amplify nonlinear transmission friction effects, so we additionally propose a "transmission disturbance observer" to mitigate this drawback. Our methods are validated on a single-degree-of-freedom elbow exoskeleton.