 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning and Optimizing the Efficacy of Spatio-Temporal Task Allocation under Temporal and Resource Constraints
Jan 05, 2026Complex multi-robot missions often require heterogeneous teams to jointly optimize task allocation, scheduling, and path planning to improve team performance under strict constraints. We formalize these complexities into a new class of problems, dubbed Spatio-Temporal Efficacy-optimized Allocation for Multi-robot systems (STEAM). STEAM builds upon trait-based frameworks that model robots using their capabilities (e.g., payload and speed), but goes beyond the typical binary success-failure model by explicitly modeling the efficacy of allocations as trait-efficacy maps. These maps encode how the aggregated capabilities assigned to a task determine performance. Further, STEAM accommodates spatio-temporal constraints, including a user-specified time budget (i.e., maximum makespan). To solve STEAM problems, we contribute a novel algorithm named Efficacy-optimized Incremental Task Allocation Graph Search (E-ITAGS) that simultaneously optimizes task performance and respects time budgets by interleaving task allocation, scheduling, and path planning. Motivated by the fact that trait-efficacy maps are difficult, if not impossible, to specify, E-ITAGS efficiently learns them using a realizability-aware active learning module. Our approach is realizability-aware since it explicitly accounts for the fact that not all combinations of traits are realizable by the robots available during learning. Further, we derive experimentally-validated bounds on E-ITAGS' suboptimality with respect to efficacy. Detailed numerical simulations and experiments using an emergency response domain demonstrate that E-ITAGS generates allocations of higher efficacy compared to baselines, while respecting resource and spatio-temporal constraints. We also show that our active learning approach is sample efficient and establishes a principled tradeoff between data and computational efficiency.
D-ITAGS: A Dynamic Interleaved Approach to Resilient Task Allocation, Scheduling, and Motion Planning
Sep 27, 2022


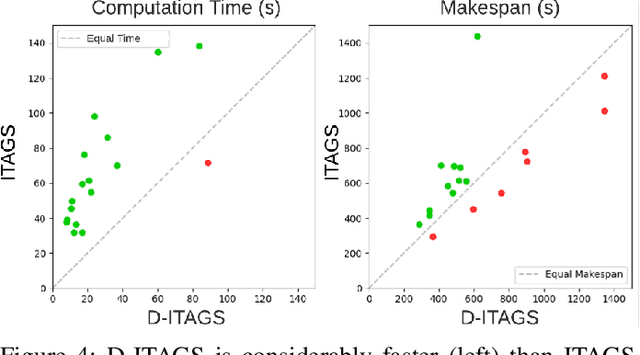
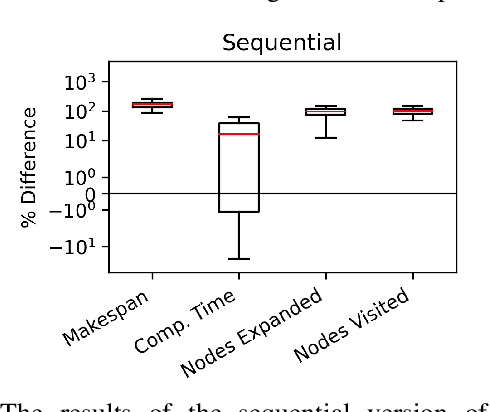
Complex, multi-objective missions require the coordination of heterogeneous robots at multiple inter-connected levels, such as coalition formation, scheduling, and motion planning. This challenge is exacerbated by dynamic changes, such as sensor and actuator failures, communication loss, and unexpected delays. We introduce Dynamic Iterative Task Allocation Graph Search (D-ITAGS) to \textit{simultaneously} address coalition formation, scheduling, and motion planning in dynamic settings involving heterogeneous teams. D-ITAGS achieves resilience via two key characteristics: i) interleaved execution, and ii) targeted repair. \textit{Interleaved execution} enables an effective search for solutions at each layer while avoiding incompatibility with other layers. \textit{Targeted repair} identifies and repairs parts of the existing solution impacted by a given disruption, while conserving the rest. In addition to algorithmic contributions, we provide theoretical insights into the inherent trade-off between time and resource optimality in these settings and derive meaningful bounds on schedule suboptimality. Our experiments reveal that i) D-ITAGS is significantly faster than recomputation from scratch in dynamic settings, with little to no loss in solution quality, and ii) the theoretical suboptimality bounds consistently hold in practice.
An Interleaved Approach to Trait-Based Task Allocation and Scheduling
Aug 05, 2021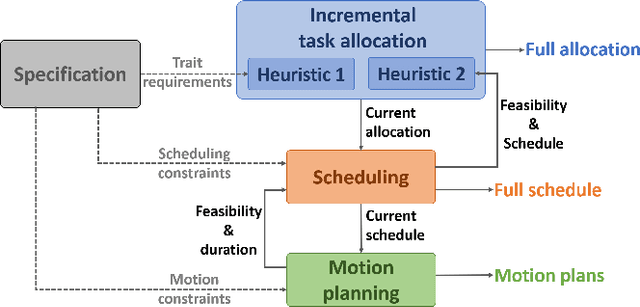
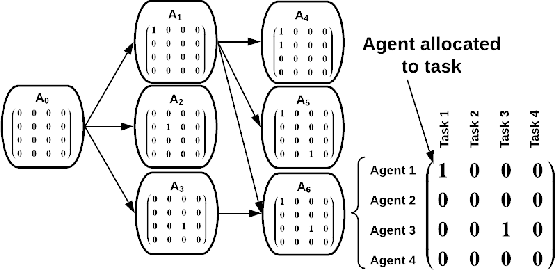
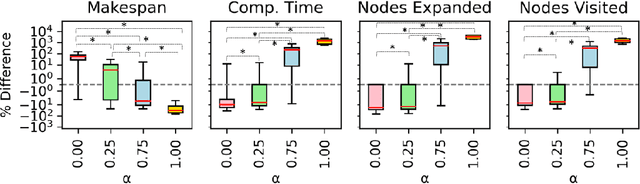
To realize effective heterogeneous multi-robot teams, researchers must leverage individual robots' relative strengths and coordinate their individual behaviors. Specifically, heterogeneous multi-robot systems must answer three important questions: \textit{who} (task allocation), \textit{when} (scheduling), and \textit{how} (motion planning). While specific variants of each of these problems are known to be NP-Hard, their interdependence only exacerbates the challenges involved in solving them together. In this paper, we present a novel framework that interleaves task allocation, scheduling, and motion planning. We introduce a search-based approach for trait-based time-extended task allocation named Incremental Task Allocation Graph Search (ITAGS). In contrast to approaches that solve the three problems in sequence, ITAGS's interleaved approach enables efficient search for allocations while simultaneously satisfying scheduling constraints and accounting for the time taken to execute motion plans. To enable effective interleaving, we develop a convex combination of two search heuristics that optimizes the satisfaction of task requirements as well as the makespan of the associated schedule. We demonstrate the efficacy of ITAGS using detailed ablation studies and comparisons against two state-of-the-art algorithms in a simulated emergency response domain.