 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Affordance Prediction with Vision via Task Oriented Grasp Quality Metrics
Jul 10, 2019
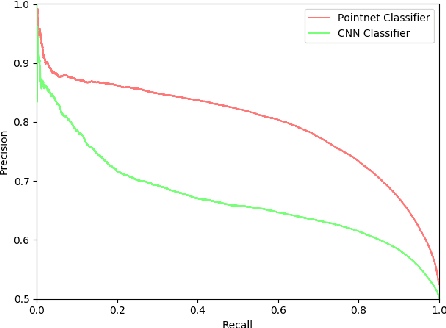
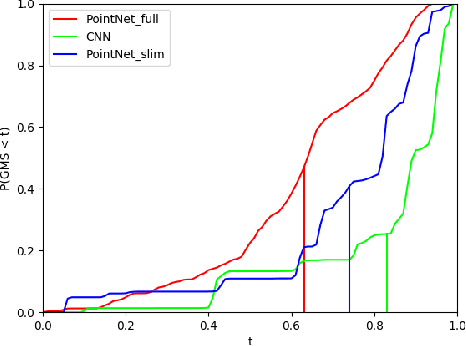
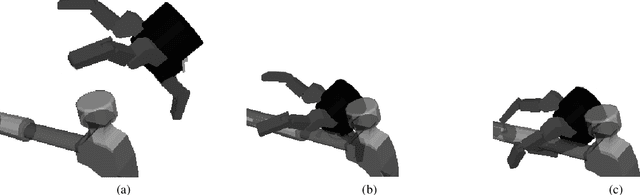
While many quality metrics exist to evaluate the quality of a grasp by itself, no clear quantification of the quality of a grasp relatively to the task the grasp is used for has been defined yet. In this paper we propose a framework to extend the concept of grasp quality metric to task-oriented grasping by defining affordance functions via basic grasp metrics for an open set of task affordances. We evaluate both the effectivity of the proposed task oriented metrics and their practical applicability by learning to infer them from vision. Indeed, we assess the validity of our novel framework both in the context of perfect information, i.e., known object model, and in the partial information context, i.e., inferring task oriented metrics from vision, underlining advantages and limitations of both situations. In the former, physical metrics of grasp hypotheses on an object are defined and computed in known object model simulation, in the latter deep models are trained to infer such properties from partial information in the form of synthesized range images.