 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan we learn where people come from? Retracing of origins in merging situations
Dec 21, 2020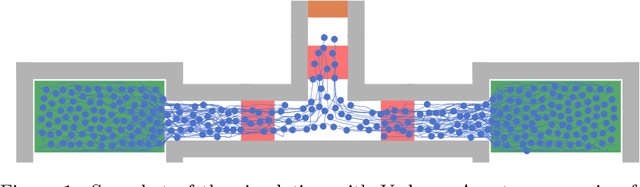
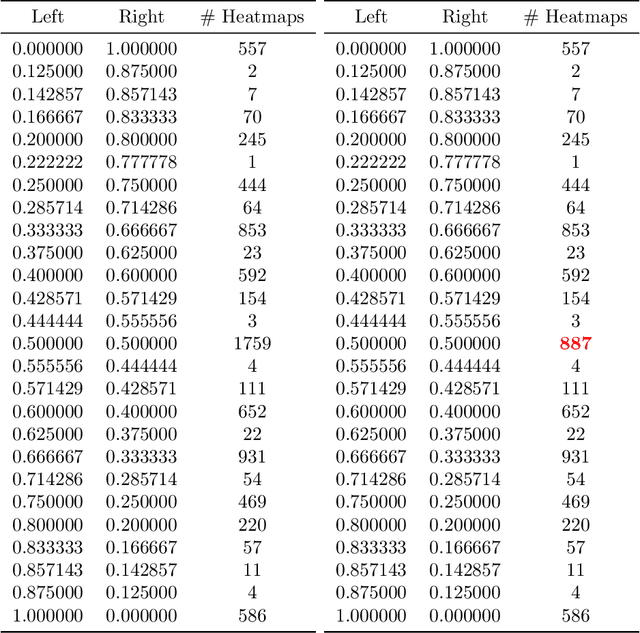
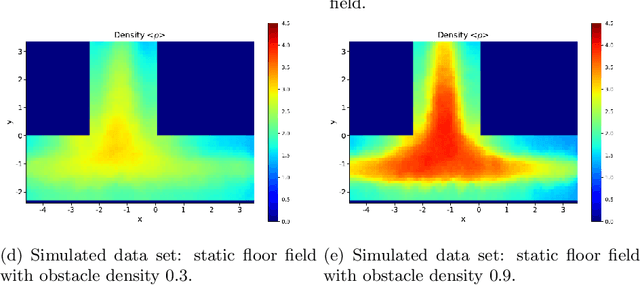

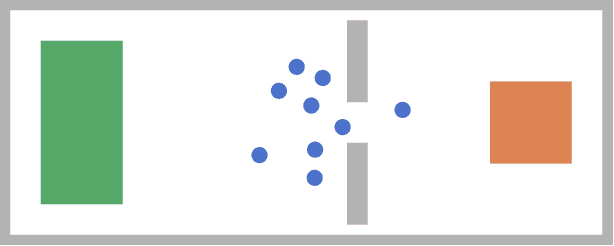
One crucial information for a pedestrian crowd simulation is the number of agents moving from an origin to a certain target. While this setup has a large impact on the simulation, it is in most setups challenging to find the number of agents that should be spawned at a source in the simulation. Often, number are chosen based on surveys and experience of modelers and event organizers. These approaches are important and useful but reach their limits when we want to perform real-time predictions. In this case, a static information about the inflow is not sufficient. Instead, we need a dynamic information that can be retrieved each time the prediction is started. Nowadays, sensor data such as video footage or GPS tracks of a crowd are often available. If we can estimate the number of pedestrians who stem from a certain origin from this sensor data, we can dynamically initialize the simulation. In this study, we use density heatmaps that can be derived from sensor data as input for a random forest regressor to predict the origin distributions. We study three different datasets: A simulated dataset, experimental data, and a hybrid approach with both experimental and simulated data. In the hybrid setup, the model is trained with simulated data and then tested on experimental data. The results demonstrate that the random forest model is able to predict the origin distribution based on a single density heatmap for all three configurations. This is especially promising for applying the approach on real data since there is often only a limited amount of data available.
Vadere: An open-source simulation framework to promote interdisciplinary understanding
Jul 16, 2019
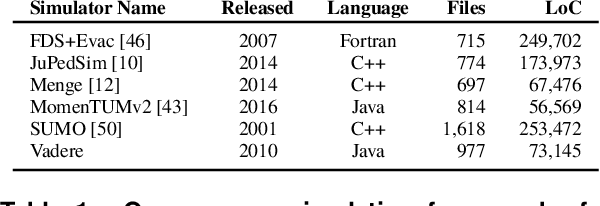

Pedestrian dynamics is an interdisciplinary field of research. Psychologists, sociologists, traffic engineers, physicists, mathematicians and computer scientists all strive to understand the dynamics of a moving crowd. In principle, computer simulations offer means to further this understanding. Yet, unlike for many classic dynamical systems in physics, there is no universally accepted locomotion model for crowd dynamics. On the contrary, a multitude of approaches, with very different characteristics, compete. Often only the experts in one special model type are able to assess the consequences these characteristics have on a simulation study. Therefore, scientists from all disciplines who wish to use simulations to analyze pedestrian dynamics need a tool to compare competing approaches. Developers, too, would profit from an easy way to get insight into an alternative modeling ansatz. Vadere meets this interdisciplinary demand by offering an open-source simulation framework that is lightweight in its approach and in its user interface while offering pre-implemented versions of the most widely spread models.
Can we learn where people go?
Dec 20, 2018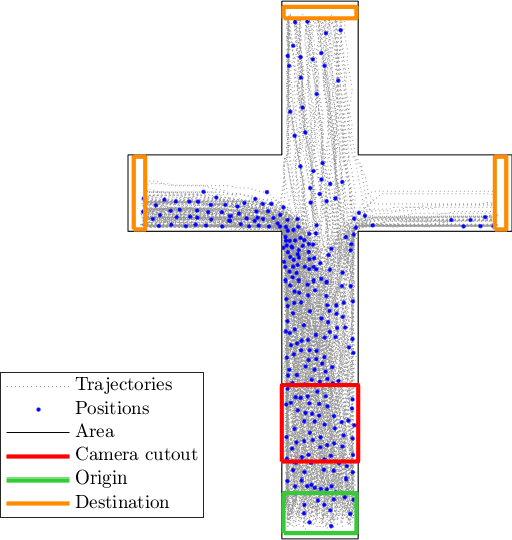


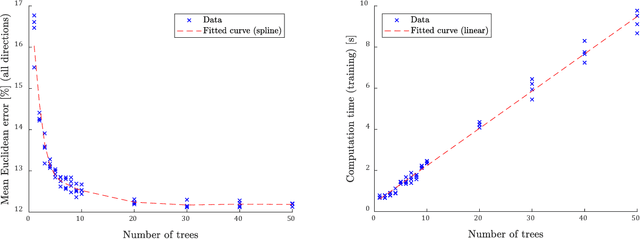
In most agent-based simulators, pedestrians navigate from origins to destinations. Consequently, destinations are essential input parameters to the simulation. While many other relevant parameters as positions, speeds and densities can be obtained from sensors, like cameras, destinations cannot be observed directly. Our research question is: Can we obtain this information from video data using machine learning methods? We use density heatmaps, which indicate the pedestrian density within a given camera cutout, as input to predict the destination distributions. For our proof of concept, we train a Random Forest predictor on an exemplary data set generated with the Vadere microscopic simulator. The scenario is a crossroad where pedestrians can head left, straight or right. In addition, we gain first insights on suitable placement of the camera. The results motivate an in-depth analysis of the methodology.