 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Task Allocation in Smart Warehouses with Multi-delivery Stations and Heterogeneous Robots
Feb 28, 2022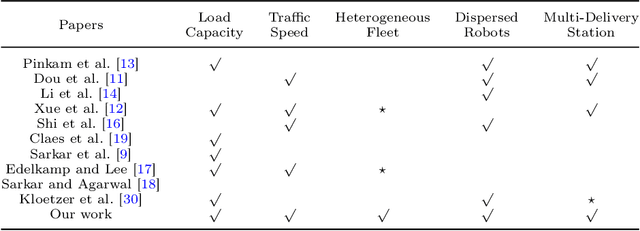
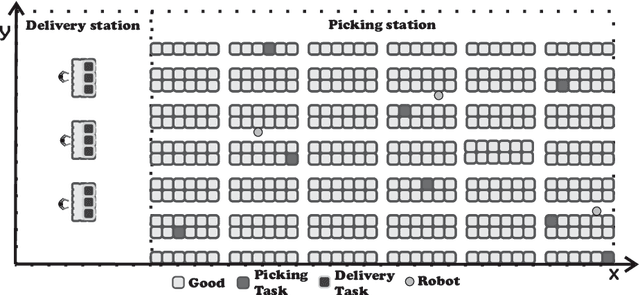
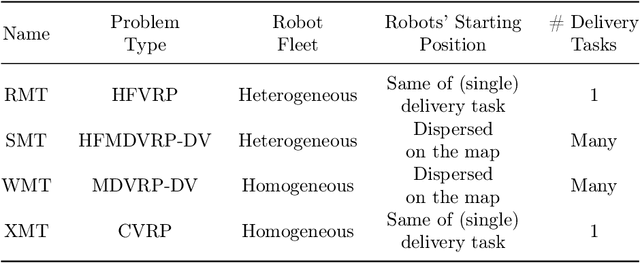
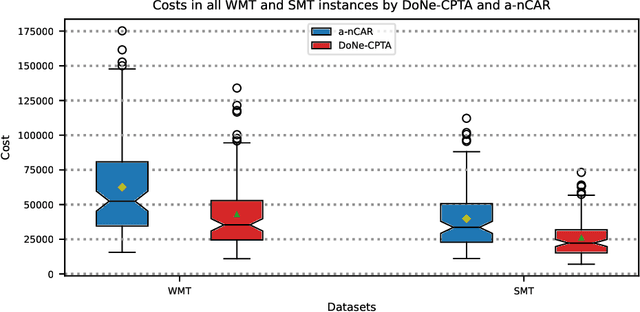
The task allocation problem in multi-robot systems (MRTA) is an NP-hard problem whose viable solutions are usually found by heuristic algorithms. Considering the increasing need of improvement on logistics, the use of robots for increasing the efficiency of logistics warehouses is becoming a requirement. In a smart warehouse the main tasks consist of employing a fleet of automated picking and mobile robots that coordinate by picking up items from a set of orders from the shelves and dropping them at the delivery stations. Two aspects generally justify multi-robot task allocation complexity: (i) environmental aspects, such as multi-delivery stations and dispersed robots (since they remain in constant motion) and (ii) fleet heterogeneity, where robots' traffic speed and capacity loads are different from each other. Despite these properties have been widely researched in the literature, they usually are investigated separately. This work proposes a scalable and efficient task allocation algorithm for smart warehouses with multi-delivery stations and heterogeneous fleets. Our strategy employs a novel cost estimator, which computes costs as a function of the robots' variable characteristics and capacity while they receive new tasks. For validating the strategy a series of experiments is performed simulating the operation of smart warehouses with multiple delivery stations and heteregenous fleets. The results show that our strategy generates routes costing up to $33$\% less than the routes generated by a state-of-the-art task allocation algorithm and $96$\% faster in test instances representing our target scenario. Considering single-delivery stations and non-dispersed robots, we reduced the number of robots by up to $18$\%, allocating tasks $92$\% faster, and generating routes whose costs are statistically similar to the routes generated by the state-of-the-art algorithm.