 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning-based Spatio Temporal Facial Feature Visual Speech Recognition
Apr 30, 2023In low-resource computing contexts, such as smartphones and other tiny devices, Both deep learning and machine learning are being used in a lot of identification systems. as authentication techniques. The transparent, contactless, and non-invasive nature of these face recognition technologies driven by AI has led to their meteoric rise in popularity in recent years. While they are mostly successful, there are still methods to get inside without permission by utilising things like pictures, masks, glasses, etc. In this research, we present an alternate authentication process that makes use of both facial recognition and the individual's distinctive temporal facial feature motions while they speak a password. Because the suggested methodology allows for a password to be specified in any language, it is not limited by language. The suggested model attained an accuracy of 96.1% when tested on the industry-standard MIRACL-VC1 dataset, demonstrating its efficacy as a reliable and powerful solution. In addition to being data-efficient, the suggested technique shows promising outcomes with as little as 10 positive video examples for training the model. The effectiveness of the network's training is further proved via comparisons with other combined facial recognition and lip reading models.
Epersist: A Self Balancing Robot Using PID Controller And Deep Reinforcement Learning
Jul 23, 2022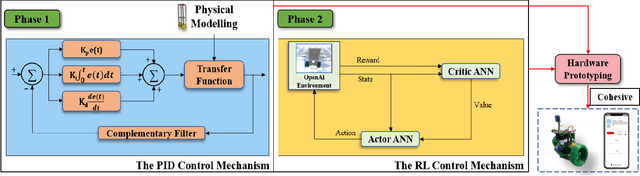
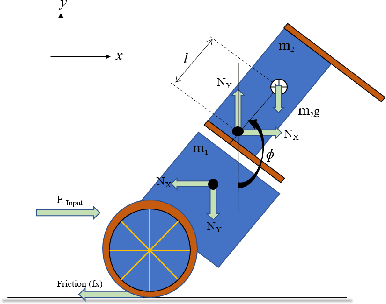
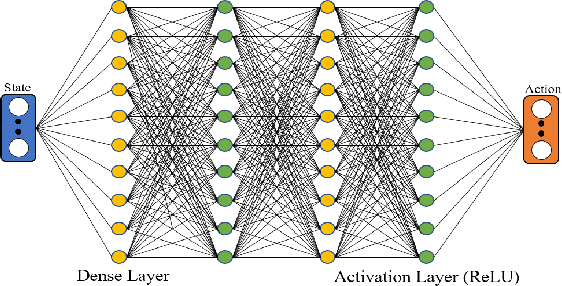
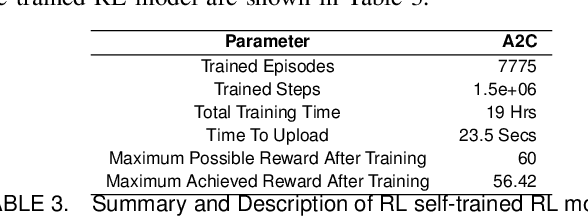
A two-wheeled self-balancing robot is an example of an inverse pendulum and is an inherently non-linear, unstable system. The fundamental concept of the proposed framework "Epersist" is to overcome the challenge of counterbalancing an initially unstable system by delivering robust control mechanisms, Proportional Integral Derivative(PID), and Reinforcement Learning (RL). Moreover, the micro-controller NodeMCUESP32 and inertial sensor in the Epersist employ fewer computational procedures to give accurate instruction regarding the spin of wheels to the motor driver, which helps control the wheels and balance the robot. This framework also consists of the mathematical model of the PID controller and a novel self-trained advantage actor-critic algorithm as the RL agent. After several experiments, control variable calibrations are made as the benchmark values to attain the angle of static equilibrium. This "Epersist" framework proposes PID and RL-assisted functional prototypes and simulations for better utility.