 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Deep Learning Technique to Control the Non-linear Dynamics of a Gravitational-wave Interferometer
Feb 15, 2023In this work we developed a deep learning technique that successfully solves a non-linear dynamic control problem. Instead of directly tackling the control problem, we combined methods in probabilistic neural networks and a Kalman-Filter-inspired model to build a non-linear state estimator for the system. We then used the estimated states to implement a trivial controller for the now fully observable system. We applied this technique to a crucial non-linear control problem that arises in the operation of the LIGO system, an interferometric gravitational-wave observatory. We demonstrated in simulation that our approach can learn from data to estimate the state of the system, allowing a successful control of the interferometer's mirror . We also developed a computationally efficient model that can run in real time at high sampling rate on a single modern CPU core, one of the key requirements for the implementation of our solution in the LIGO digital control system. We believe these techniques could be used to help tackle similar non-linear control problems in other applications.
Machine-learning non-stationary noise out of gravitational wave detectors
Jan 10, 2020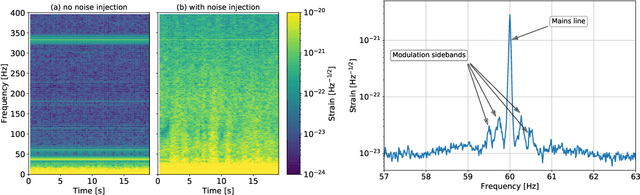

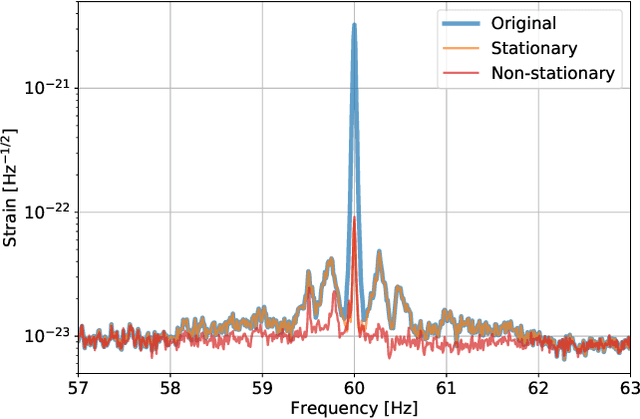

Signal extraction out of background noise is a common challenge in high precision physics experiments, where the measurement output is often a continuous data stream. To improve the signal to noise ratio of the detection, witness sensors are often used to independently measure background noises and subtract them from the main signal. If the noise coupling is linear and stationary, optimal techniques already exist and are routinely implemented in many experiments. However, when the noise coupling is non-stationary, linear techniques often fail or are sub-optimal. Inspired by the properties of the background noise in gravitational wave detectors, this work develops a novel algorithm to efficiently characterize and remove non-stationary noise couplings, provided there exist witnesses of the noise source and of the modulation. In this work, the algorithm is described in its most general formulation, and its efficiency is demonstrated with examples from the data of the Advanced LIGO gravitational wave observatory, where we could obtain an improvement of the detector gravitational wave reach without introducing any bias on the source parameter estimation.