 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Soft Actor-Critic for Low-Level UAV Control
Oct 05, 2020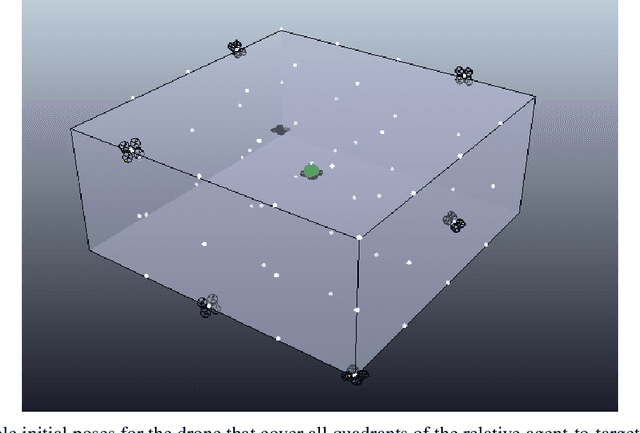
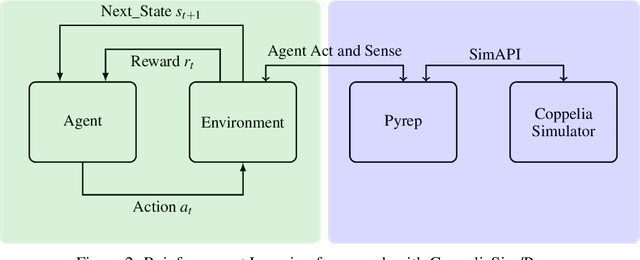
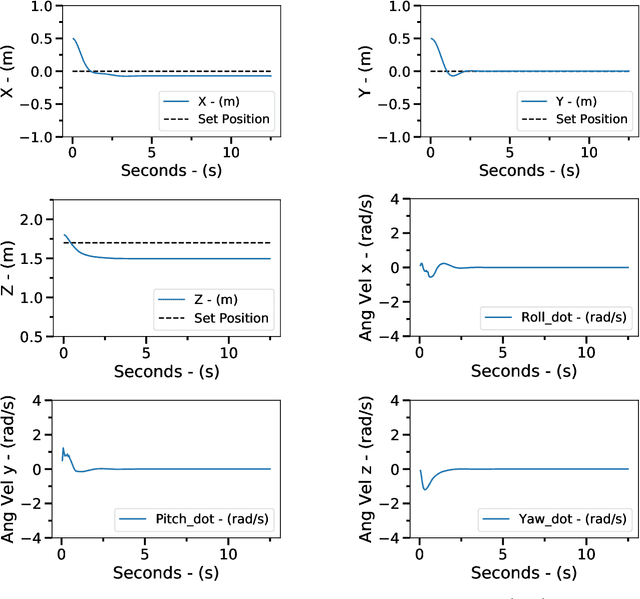
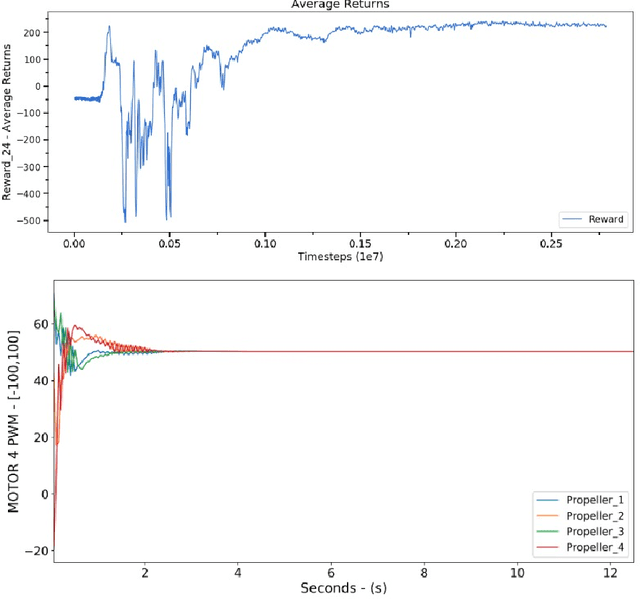
Unmanned Aerial Vehicles (UAVs), or drones, have recently been used in several civil application domains from organ delivery to remote locations to wireless network coverage. These platforms, however, are naturally unstable systems for which many different control approaches have been proposed. Generally based on classic and modern control, these algorithms require knowledge of the robot's dynamics. However, recently, model-free reinforcement learning has been successfully used for controlling drones without any prior knowledge of the robot model. In this work, we present a framework to train the Soft Actor-Critic (SAC) algorithm to low-level control of a quadrotor in a go-to-target task. All experiments were conducted under simulation. With the experiments, we show that SAC can not only learn a robust policy, but it can also cope with unseen scenarios. Videos from the simulations are available in https://www.youtube.com/watch?v=9z8vGs0Ri5g and the code in https://github.com/larocs/SAC_uav.