 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Fly on the Wall -- Exploiting Acoustic Side-Channels in Differential Pressure Sensors
Sep 26, 2024Differential Pressure Sensors are widely deployed to monitor critical environments. However, our research unveils a previously overlooked vulnerability: their high sensitivity to pressure variations makes them susceptible to acoustic side-channel attacks. We demonstrate that the pressure-sensing diaphragms in DPS can inadvertently capture subtle air vibrations caused by speech, which propagate through the sensor's components and affect the pressure readings. Exploiting this discovery, we introduce \textbf{BaroVox}, a novel attack that reconstructs speech from DPS readings, effectively turning DPS into a "fly on the wall." We model the effect of sound on DPS, exploring the limits and challenges of acoustic leakage. To overcome these challenges, we propose two solutions: a signal-processing approach using a unique spectral subtraction method and a deep learning-based approach for keyword classification. Evaluations under various conditions demonstrate BaroVox's effectiveness, achieving a word error rate of 0.29 for manual recognition and 90.51\% accuracy for automatic recognition. Our findings highlight the significant privacy implications of this vulnerability. We also discuss potential defense strategies to mitigate the risks posed by BaroVox.
0-Step Capturability, Motion Decomposition and Global Feedback Control of the 3D Variable Height-Inverted Pendulum
Dec 12, 2019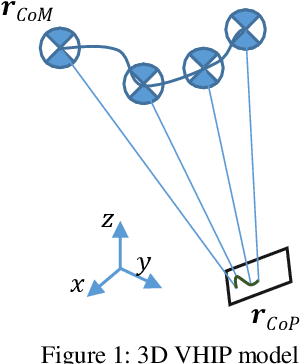


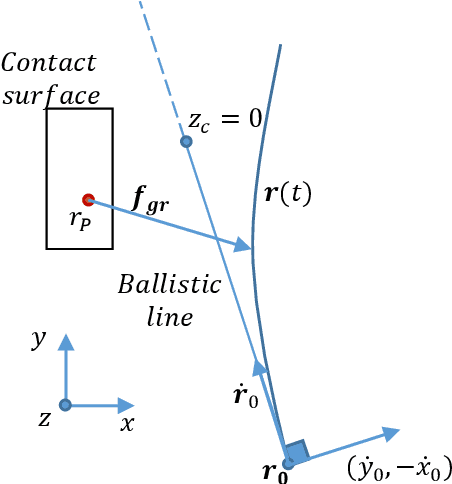
One common method for stabilizing robots after a push is the Instantaneous Capture Point, however, this has the fundamental limitation of assuming constant height. Although there are several works for balancing bipedal robots including height variations in 2D, the amount of literature on 3D models is limited. There are optimization methods using variable Center of Pressure (CoP) and reaction force to the ground, although they do not provide the physical region where a robot can step and require a precomputation for the analysis. This work provides the necessary and sufficient conditions to maintain balance of the 3D Variable Height Inverted Pendulum (VHIP) with both, fixed and variable CoP. We also prove that the 3D VHIP with Fixed CoP is the same as its 2D version, and we generalize controllers working on the 2D VHIP to the 3D VHIP. We also show the generalization of the Divergent Component of Motion to the 3D VHIP and we provide an alternative motion decomposition for the analysis of height and CoP strategies independently. This allow us to generalize previous global feedback controllers done in the 2D VHIP to the 3D VHIP with a Variable CoP.