 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVOR Adaptation on a Humanoid iCub Robot Using a Spiking Cerebellar Model
Mar 31, 2020
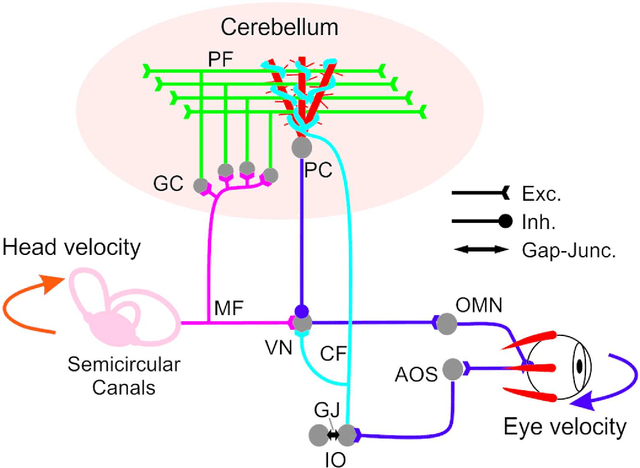
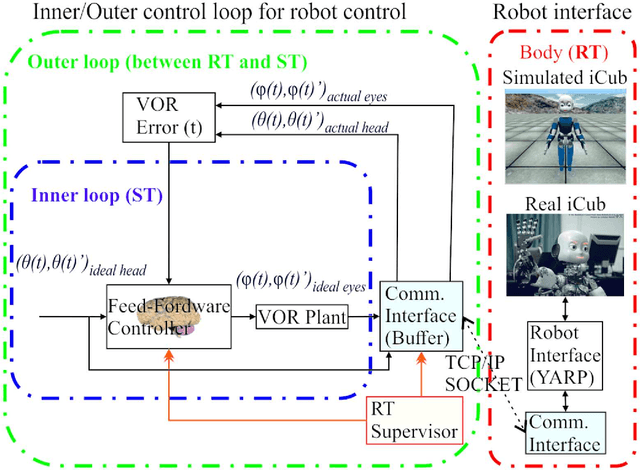
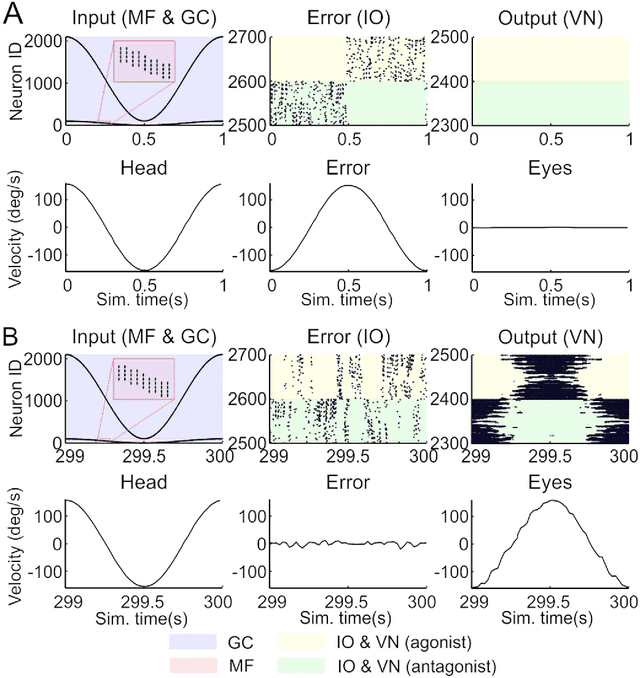
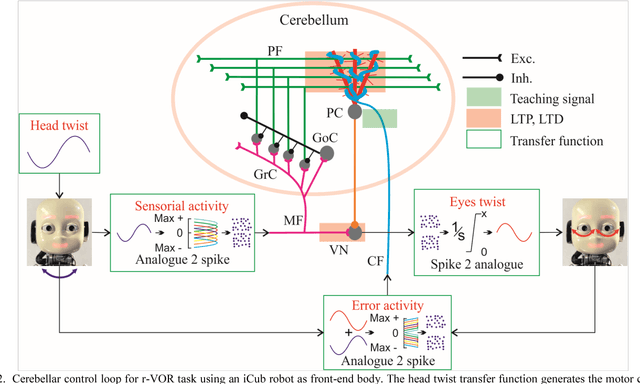
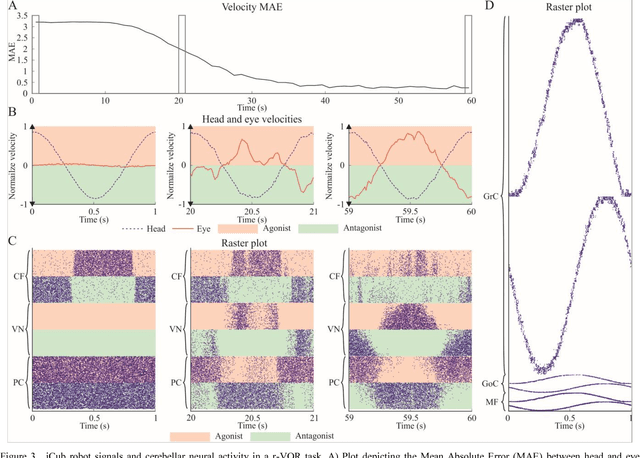
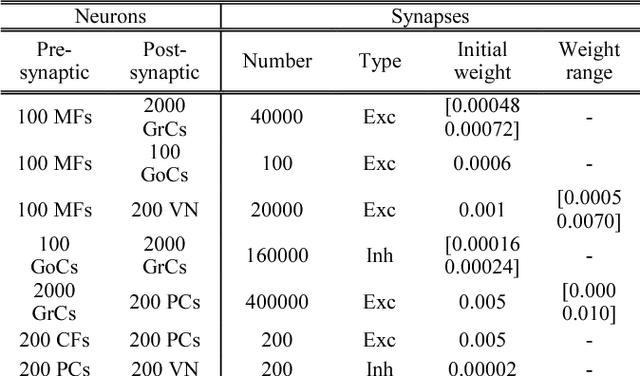
We embed a spiking cerebellar model within an adaptive real-time (RT) control loop that is able to operate a real robotic body (iCub) when performing different vestibulo-ocular reflex (VOR) tasks. The spiking neural network computation, including event- and time-driven neural dynamics, neural activity, and spike-timing dependent plasticity (STDP) mechanisms, leads to a nondeterministic computation time caused by the neural activity volleys encountered during cerebellar simulation. This nondeterministic computation time motivates the integration of an RT supervisor module that is able to ensure a well-orchestrated neural computation time and robot operation. Actually, our neurorobotic experimental setup (VOR) benefits from the biological sensory motor delay between the cerebellum and the body to buffer the computational overloads as well as providing flexibility in adjusting the neural computation time and RT operation. The RT supervisor module provides for incremental countermeasures that dynamically slow down or speed up the cerebellar simulation by either halting the simulation or disabling certain neural computation features (i.e., STDP mechanisms, spike propagation, and neural updates) to cope with the RT constraints imposed by the real robot operation. This neurorobotic experimental setup is applied to different horizontal and vertical VOR adaptive tasks that are widely used by the neuroscientific community to address cerebellar functioning. We aim to elucidate the manner in which the combination of the cerebellar neural substrate and the distributed plasticity shapes the cerebellar neural activity to mediate motor adaptation. This paper underlies the need for a two-stage learning process to facilitate VOR acquisition.
On robot compliance. A cerebellar control approach
Mar 31, 2020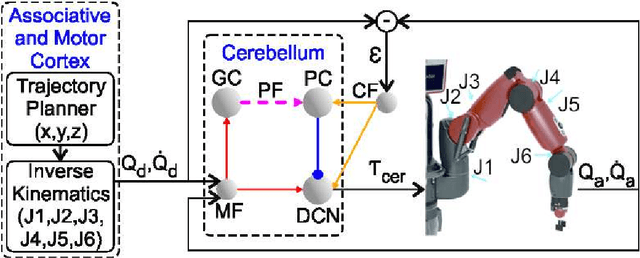
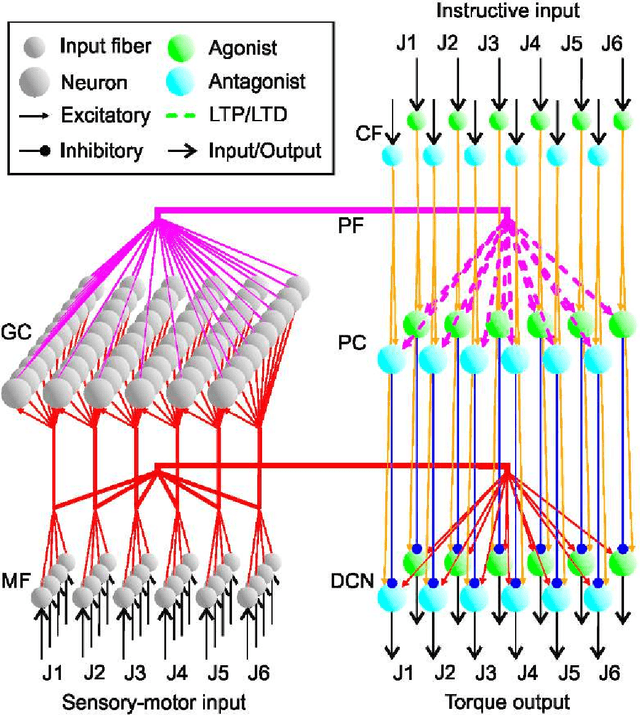
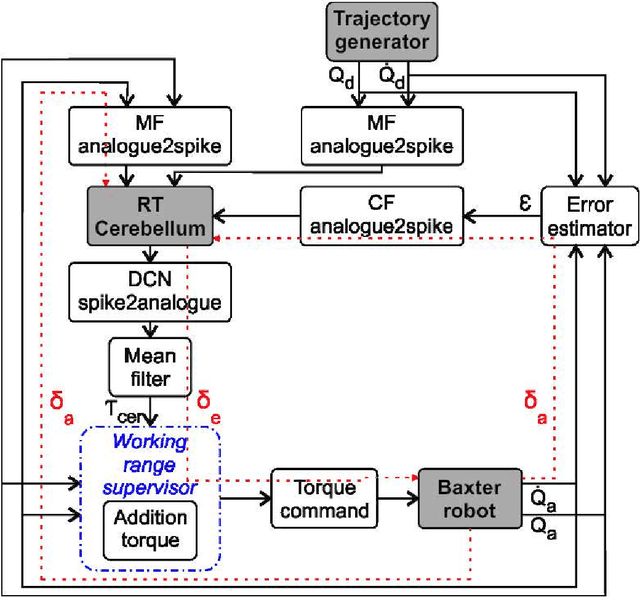
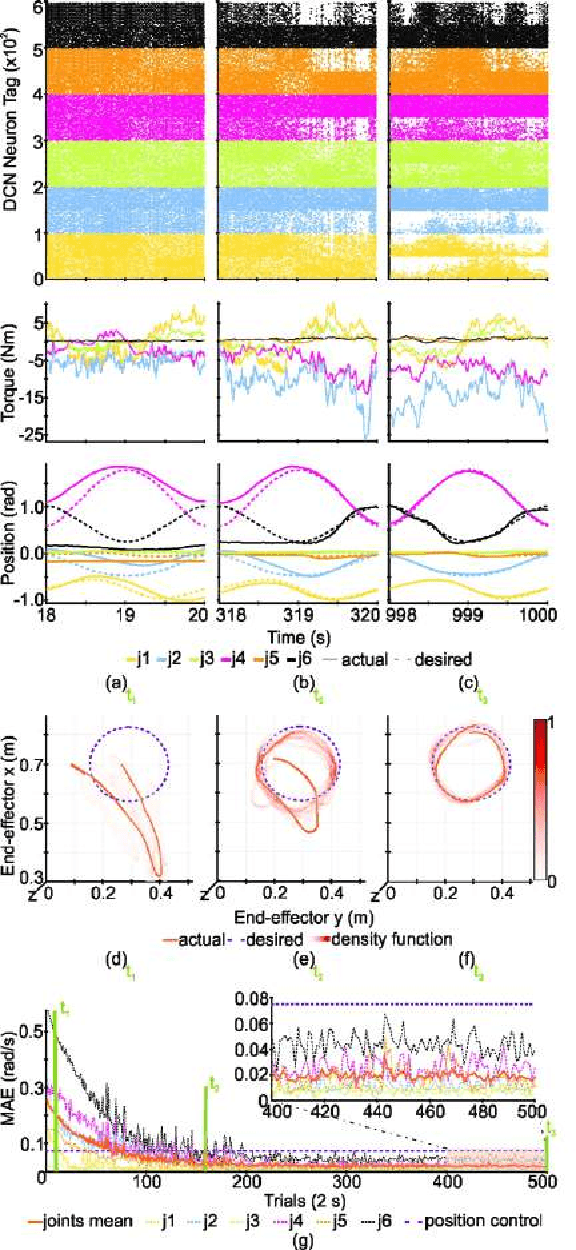
The work presented here is a novel biological approach for the compliant control of a robotic arm in real time (RT). We integrate a spiking cerebellar network at the core of a feedback control loop performing torque-driven control. The spiking cerebellar controller provides torque commands allowing for accurate and coordinated arm movements. To compute these output motor commands, the spiking cerebellar controller receives the robot's sensorial signals, the robot's goal behavior, and an instructive signal. These input signals are translated into a set of evolving spiking patterns representing univocally a specific system state at every point of time. Spike-timing-dependent plasticity (STDP) is then supported, allowing for building adaptive control. The spiking cerebellar controller continuously adapts the torque commands provided to the robot from experience as STDP is deployed. Adaptive torque commands, in turn, help the spiking cerebellar controller to cope with built-in elastic elements within the robot's actuators mimicking human muscles (inherently elastic). We propose a natural integration of a bio inspired control scheme, based on the cerebellum, with a compliant robot. We prove that our compliant approach outperforms the accuracy of the default factory-installed position control in a set of tasks used for addressing cerebellar motor behavior: controlling six degrees of freedom (DoF) in smooth movements, fast ballistic movements, and unstructured scenario compliant movements.
A Metric for Evaluating Neural Input Representation in Supervised Learning Networks
Mar 03, 2020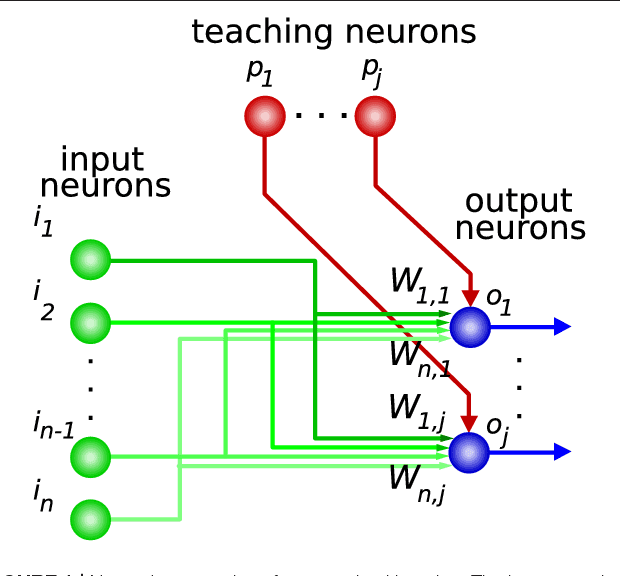
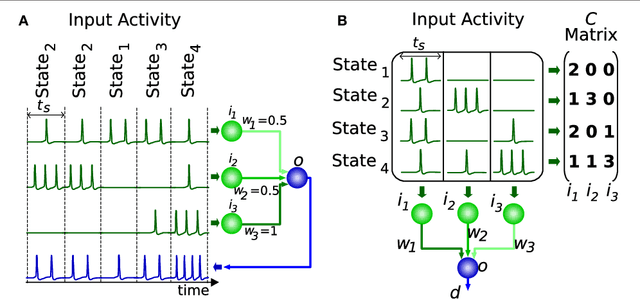
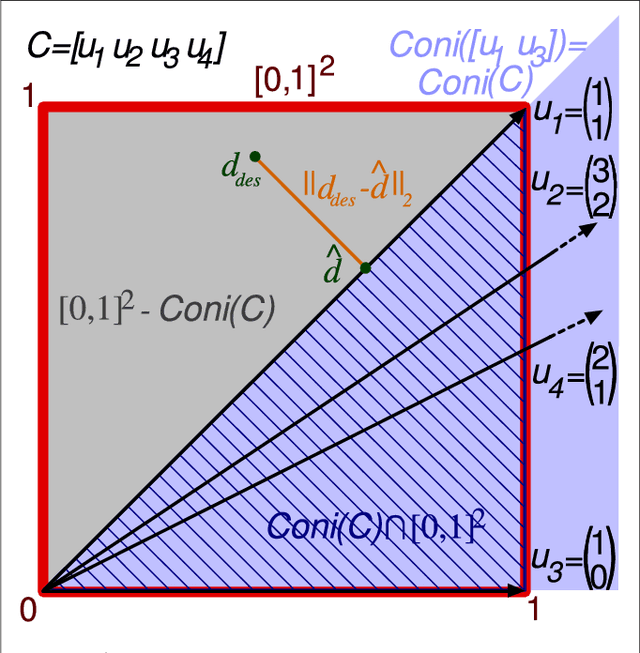
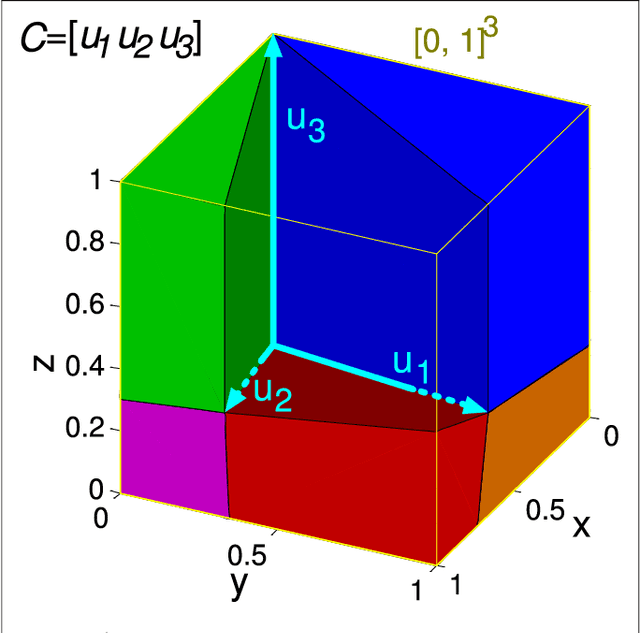
Supervised learning has long been attributed to several feed-forward neural circuits within the brain, with attention being paid to the cerebellar granular layer. The focus of this study is to evaluate the input activity representation of these feed-forward neural networks. The activity of cerebellar granule cells is conveyed by parallel fibers and translated into Purkinje cell activity; the sole output of the cerebellar cortex. The learning process at this parallel-fiber-to-Purkinje-cell connection makes each Purkinje cell sensitive to a set of specific cerebellar states, determined by the granule-cell activity during a certain time window. A Purkinje cell becomes sensitive to each neural input state and, consequently, the network operates as a function able to generate a desired output for each provided input by means of supervised learning. However, not all sets of Purkinje cell responses can be assigned to any set of input states due to the network's own limitations (inherent to the network neurobiological substrate), that is, not all input-output mapping can be learned. A limiting factor is the representation of the input states through granule-cell activity. The quality of this representation will determine the capacity of the network to learn a varied set of outputs. In this study we present an algorithm for evaluating quantitatively the level of compatibility/interference amongst a set of given cerebellar states according to their representation (granule-cell activation patterns) without the need for actually conducting simulations and network training. The algorithm input consists of a real-number matrix that codifies the activity level of every considered granule-cell in each state. The capability of this representation to generate a varied set of outputs is evaluated geometrically, thus resulting in a real number that assesses the goodness of the representation
Exploring vestibulo-ocular adaptation in a closed-loop neuro-robotic experiment using STDP. A simulation study
Mar 03, 2020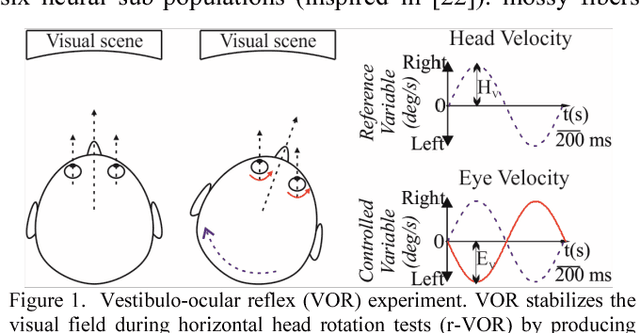
Studying and understanding the computational primitives of our neural system requires for a diverse and complementary set of techniques. In this work, we use the Neuro-robotic Platform (NRP)to evaluate the vestibulo ocular cerebellar adaptatIon (Vestibulo-ocular reflex, VOR)mediated by two STDP mechanisms located at the cerebellar molecular layer and the vestibular nuclei respectively. This simulation study adopts an experimental setup (rotatory VOR)widely used by neuroscientists to better understand the contribution of certain specific cerebellar properties (i.e. distributed STDP, neural properties, coding cerebellar topology, etc.)to r-VOR adaptation. The work proposes and describes an embodiment solution for which we endow a simulated humanoid robot (iCub)with a spiking cerebellar model by means of the NRP, and we face the humanoid to an r-VOR task. The results validate the adaptive capabilities of the spiking cerebellar model (with STDP)in a perception-action closed-loop (r- VOR)causing the simulated iCub robot to mimic a human behavior.