 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInformative Path Planning to Explore and Map Unknown Planetary Surfaces with Gaussian Processes
Mar 20, 2025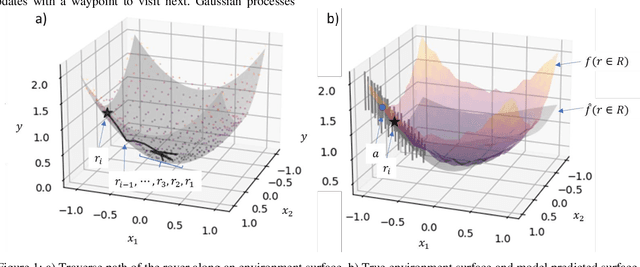



Many environments, such as unvisited planetary surfaces and oceanic regions, remain unexplored due to a lack of prior knowledge. Autonomous vehicles must sample upon arrival, process data, and either transmit findings to a teleoperator or decide where to explore next. Teleoperation is suboptimal, as human intuition lacks mathematical guarantees for optimality. This study evaluates an informative path planning algorithm for mapping a scalar variable distribution while minimizing travel distance and ensuring model convergence. We compare traditional open loop coverage methods (e.g., Boustrophedon, Spiral) with information-theoretic approaches using Gaussian processes, which update models iteratively with confidence metrics. The algorithm's performance is tested on three surfaces, a parabola, Townsend function, and lunar crater hydration map, to assess noise, convexity, and function behavior. Results demonstrate that information-driven methods significantly outperform naive exploration in reducing model error and travel distance while improving convergence potential.
Cost-Aware Query Policies in Active Learning for Efficient Autonomous Robotic Exploration
Oct 31, 2024



In missions constrained by finite resources, efficient data collection is critical. Informative path planning, driven by automated decision-making, optimizes exploration by reducing the costs associated with accurate characterization of a target in an environment. Previous implementations of active learning did not consider the action cost for regression problems or only considered the action cost for classification problems. This paper analyzes an AL algorithm for Gaussian Process regression while incorporating action cost. The algorithm's performance is compared on various regression problems to include terrain mapping on diverse simulated surfaces along metrics of root mean square error, samples and distance until convergence, and model variance upon convergence. The cost-dependent acquisition policy doesn't organically optimize information gain over distance. Instead, the traditional uncertainty metric with a distance constraint best minimizes root-mean-square error over trajectory distance. This studys impact is to provide insight into incorporating action cost with AL methods to optimize exploration under realistic mission constraints.
Comparing Active Learning Performance Driven by Gaussian Processes or Bayesian Neural Networks for Constrained Trajectory Exploration
Sep 28, 2023



Robots with increasing autonomy progress our space exploration capabilities, particularly for in-situ exploration and sampling to stand in for human explorers. Currently, humans drive robots to meet scientific objectives, but depending on the robot's location, the exchange of information and driving commands between the human operator and robot may cause undue delays in mission fulfillment. An autonomous robot encoded with a scientific objective and an exploration strategy incurs no communication delays and can fulfill missions more quickly. Active learning algorithms offer this capability of intelligent exploration, but the underlying model structure varies the performance of the active learning algorithm in accurately forming an understanding of the environment. In this paper, we investigate the performance differences between active learning algorithms driven by Gaussian processes or Bayesian neural networks for exploration strategies encoded on agents that are constrained in their trajectories, like planetary surface rovers. These two active learning strategies were tested in a simulation environment against science-blind strategies to predict the spatial distribution of a variable of interest along multiple datasets. The performance metrics of interest are model accuracy in root mean squared (RMS) error, training time, model convergence, total distance traveled until convergence, and total samples until convergence. Active learning strategies encoded with Gaussian processes require less computation to train, converge to an accurate model more quickly, and propose trajectories of shorter distance, except in a few complex environments in which Bayesian neural networks achieve a more accurate model in the large data regime due to their more expressive functional bases. The paper concludes with advice on when and how to implement either exploration strategy for future space missions.
Learned and Controlled Autonomous Robotic Exploration in an Extreme, Unknown Environment
Apr 02, 2020



Exploring and traversing extreme terrain with surface robots is difficult, but highly desirable for many applications, including exploration of planetary surfaces, search and rescue, among others. For these applications, to ensure the robot can predictably locomote, the interaction between the terrain and vehicle, terramechanics, must be incorporated into the model of the robot's locomotion. Modeling terramechanic effects is difficult and may be impossible in situations where the terrain is not known a priori. For these reasons, learning a terramechanics model online is desirable to increase the predictability of the robot's motion. A problem with previous implementations of learning algorithms is that the terramechanics model and corresponding generated control policies are not easily interpretable or extensible. If the models were of interpretable form, designers could use the learned models to inform vehicle and/or control design changes to refine the robot architecture for future applications. This paper explores a new method for learning a terramechanics model and a control policy using a model-based genetic algorithm. The proposed method yields an interpretable model, which can be analyzed using preexisting analysis methods. The paper provides simulation results that show for a practical application, the genetic algorithm performance is approximately equal to the performance of a state-of-the-art neural network approach, which does not provide an easily interpretable model.