 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCamera motion estimation through planar deformation determination
Mar 27, 2008
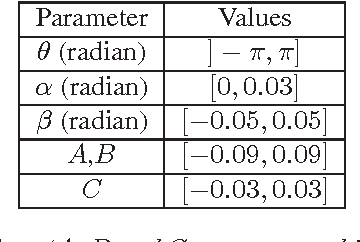


In this paper, we propose a global method for estimating the motion of a camera which films a static scene. Our approach is direct, fast and robust, and deals with adjacent frames of a sequence. It is based on a quadratic approximation of the deformation between two images, in the case of a scene with constant depth in the camera coordinate system. This condition is very restrictive but we show that provided translation and depth inverse variations are small enough, the error on optical flow involved by the approximation of depths by a constant is small. In this context, we propose a new model of camera motion, that allows to separate the image deformation in a similarity and a ``purely'' projective application, due to change of optical axis direction. This model leads to a quadratic approximation of image deformation that we estimate with an M-estimator; we can immediatly deduce camera motion parameters.
* 21 pages, version modifi\'ee accept\'e le 20 mars 2008
Total Variation Minimization and Graph Cuts for Moving Objects Segmentation
Sep 18, 2006

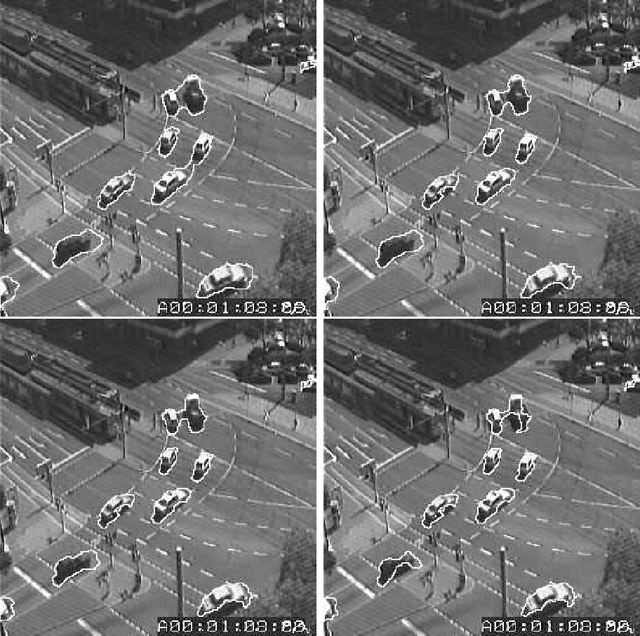
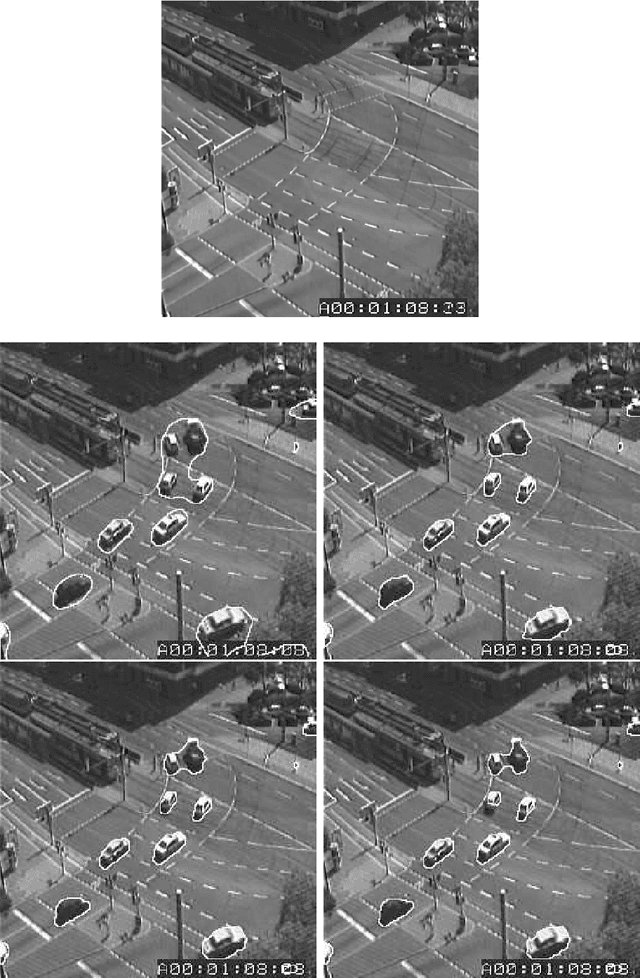
In this paper, we are interested in the application to video segmentation of the discrete shape optimization problem involving the shape weighted perimeter and an additional term depending on a parameter. Based on recent works and in particular the one of Darbon and Sigelle, we justify the equivalence of the shape optimization problem and a weighted total variation regularization. For solving this problem, we adapt the projection algorithm proposed recently for solving the basic TV regularization problem. Another solution to the shape optimization investigated here is the graph cut technique. Both methods have the advantage to lead to a global minimum. Since we can distinguish moving objects from static elements of a scene by analyzing norm of the optical flow vectors, we choose the optical flow norm as initial data. In order to have the contour as close as possible to an edge in the image, we use a classical edge detector function as the weight of the weighted total variation. This model has been used in one of our former works. We also apply the same methods to a video segmentation model used by Jehan-Besson, Barlaud and Aubert. In this case, only standard perimeter is incorporated in the shape functional. We also propose another way for finding moving objects by using an a contrario detection of objects on the image obtained by solving the Rudin-Osher-Fatemi Total Variation regularization problem.We can notice the segmentation can be associated to a level set in the former methods.