 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-based graph reinforcement learning for inductive traffic signal control
Aug 01, 2022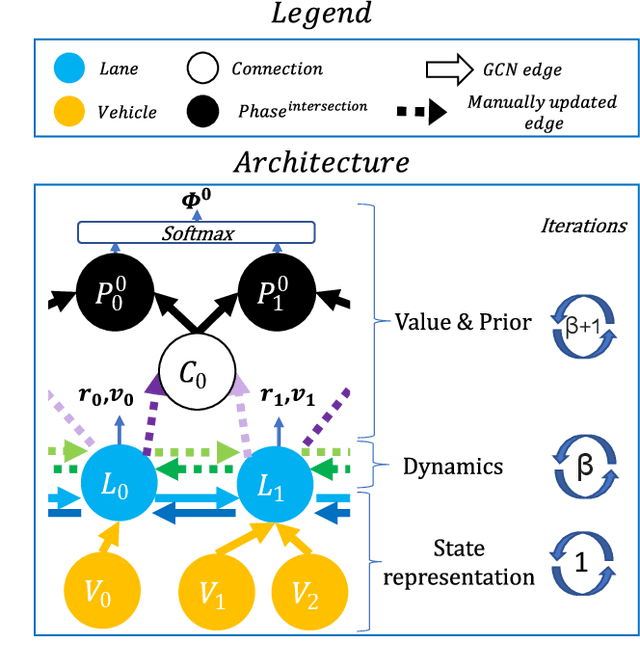
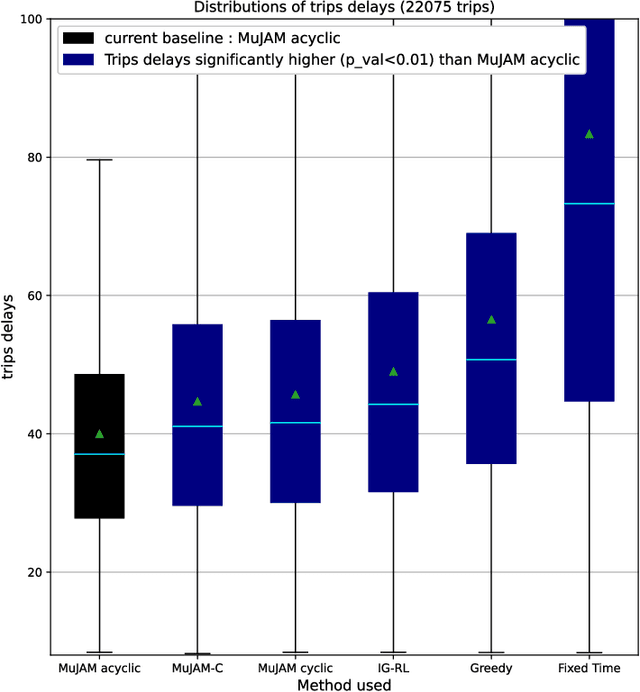
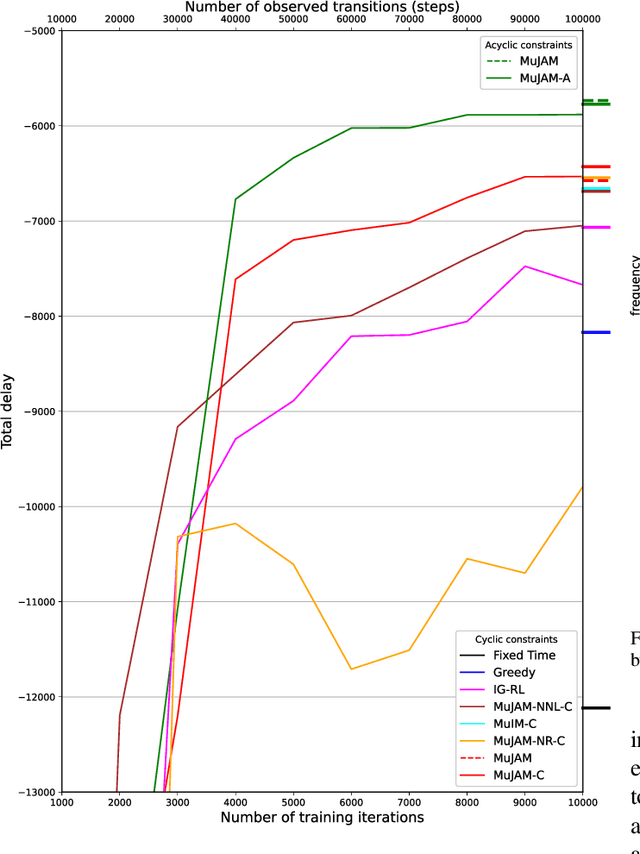
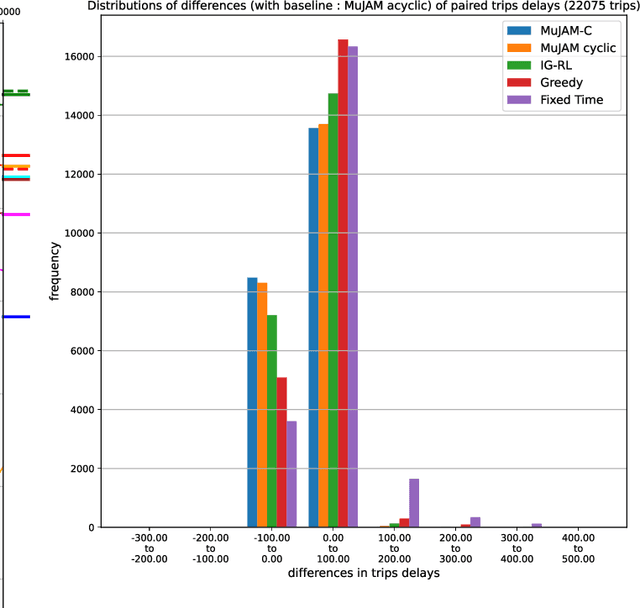
Most reinforcement learning methods for adaptive-traffic-signal-control require training from scratch to be applied on any new intersection or after any modification to the road network, traffic distribution, or behavioral constraints experienced during training. Considering 1) the massive amount of experience required to train such methods, and 2) that experience must be gathered by interacting in an exploratory fashion with real road-network-users, such a lack of transferability limits experimentation and applicability. Recent approaches enable learning policies that generalize for unseen road-network topologies and traffic distributions, partially tackling this challenge. However, the literature remains divided between the learning of cyclic (the evolution of connectivity at an intersection must respect a cycle) and acyclic (less constrained) policies, and these transferable methods 1) are only compatible with cyclic constraints and 2) do not enable coordination. We introduce a new model-based method, MuJAM, which, on top of enabling explicit coordination at scale for the first time, pushes generalization further by allowing a generalization to the controllers' constraints. In a zero-shot transfer setting involving both road networks and traffic settings never experienced during training, and in a larger transfer experiment involving the control of 3,971 traffic signal controllers in Manhattan, we show that MuJAM, using both cyclic and acyclic constraints, outperforms domain-specific baselines as well as another transferable approach.
IG-RL: Inductive Graph Reinforcement Learning for Massive-Scale Traffic Signal Control
Mar 19, 2020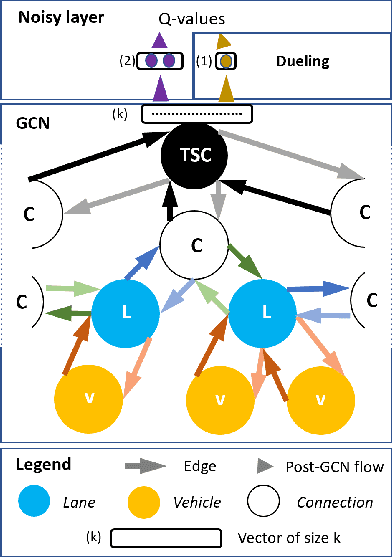



Scaling adaptive traffic-signal control involves dealing with combinatorial state and action spaces. Multi-agent reinforcement learning attempts to address this challenge by distributing control to specialized agents. However, specialization hinders generalization and transferability, and the computational graphs underlying neural-networks architectures---dominating in the multi-agent setting---do not offer the flexibility to handle an arbitrary number of entities which changes both between road networks, and over time as vehicles traverse the network. We introduce Inductive Graph Reinforcement Learning (IG-RL) based on graph-convolutional networks which adapts to the structure of any road network, to learn detailed representations of traffic-controllers and their surroundings. Our decentralized approach enables learning of a transferable-adaptive-traffic-signal-control policy. After being trained on an arbitrary set of road networks, our model can generalize to new road networks, traffic distributions, and traffic regimes, with no additional training and a constant number of parameters, enabling greater scalability compared to prior methods. Furthermore, our approach can exploit the granularity of available data by capturing the (dynamic) demand at both the lane and the vehicle levels. The proposed method is tested on both road networks and traffic settings never experienced during training. We compare IG-RL to multi-agent reinforcement learning and domain-specific baselines. In both synthetic road networks and in a larger experiment involving the control of the 3,971 traffic signals of Manhattan, we show that different instantiations of IG-RL outperform baselines.