 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAmortised inference of fractional Brownian motion with linear computational complexity
Mar 21, 2022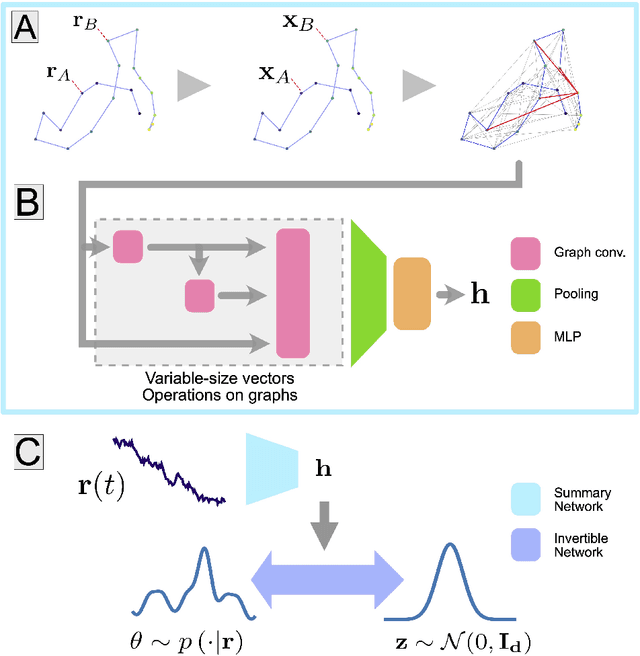


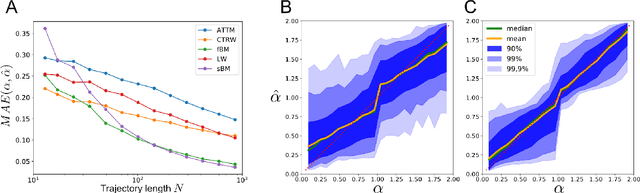
We introduce a simulation-based, amortised Bayesian inference scheme to infer the parameters of random walks. Our approach learns the posterior distribution of the walks' parameters with a likelihood-free method. In the first step a graph neural network is trained on simulated data to learn optimized low-dimensional summary statistics of the random walk. In the second step an invertible neural network generates the posterior distribution of the parameters from the learnt summary statistics using variational inference. We apply our method to infer the parameters of the fractional Brownian motion model from single trajectories. The computational complexity of the amortized inference procedure scales linearly with trajectory length, and its precision scales similarly to the Cram{\'e}r-Rao bound over a wide range of lengths. The approach is robust to positional noise, and generalizes well to trajectories longer than those seen during training. Finally, we adapt this scheme to show that a finite decorrelation time in the environment can furthermore be inferred from individual trajectories.
Learning physical properties of anomalous random walks using graph neural networks
Mar 22, 2021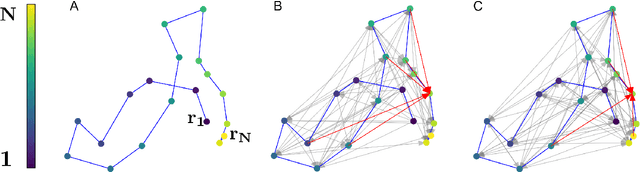


Single particle tracking allows probing how biomolecules interact physically with their natural environments. A fundamental challenge when analysing recorded single particle trajectories is the inverse problem of inferring the physical model or class of models of the underlying random walks. Reliable inference is made difficult by the inherent stochastic nature of single particle motion, by experimental noise, and by the short duration of most experimental trajectories. Model identification is further complicated by the fact that main physical properties of random walk models are only defined asymptotically, and are thus degenerate for short trajectories. Here, we introduce a new, fast approach to inferring random walk properties based on graph neural networks (GNNs). Our approach consists in associating a vector of features with each observed position, and a sparse graph structure with each observed trajectory. By performing simulation-based supervised learning on this construct [1], we show that we can reliably learn models of random walks and their anomalous exponents. The method can naturally be applied to trajectories of any length. We show its efficiency in analysing various anomalous random walks of biological relevance that were proposed in the AnDi challenge [2]. We explore how information is encoded in the GNN, and we show that it learns relevant physical features of the random walks. We furthermore evaluate its ability to generalize to types of trajectories not seen during training, and we show that the GNN retains high accuracy even with few parameters. We finally discuss the possibility to leverage these networks to analyse experimental data.