 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRandom Feedback Alignment Algorithms to train Neural Networks: Why do they Align?
Jun 04, 2023Feedback alignment algorithms are an alternative to backpropagation to train neural networks, whereby some of the partial derivatives that are required to compute the gradient are replaced by random terms. This essentially transforms the update rule into a random walk in weight space. Surprisingly, learning still works with those algorithms, including training of deep neural networks. This is generally attributed to an alignment of the update of the random walker with the true gradient - the eponymous gradient alignment -- which drives an approximate gradient descend. The mechanism that leads to this alignment remains unclear, however. In this paper, we use mathematical reasoning and simulations to investigate gradient alignment. We observe that the feedback alignment update rule has fixed points, which correspond to extrema of the loss function. We show that gradient alignment is a stability criterion for those fixed points. It is only a necessary criterion for algorithm performance. Experimentally, we demonstrate that high levels of gradient alignment can lead to poor algorithm performance and that the alignment is not always driving the gradient descend.
Directional Direct Feedback Alignment: Estimating Backpropagation Paths for Efficient Learning on Neural Processors
Dec 16, 2022The error Backpropagation algorithm (BP) is a key method for training deep neural networks. While performant, it is also resource-demanding in terms of computation, memory usage and energy. This makes it unsuitable for online learning on edge devices that require a high processing rate and low energy consumption. More importantly, BP does not take advantage of the parallelism and local characteristics offered by dedicated neural processors. There is therefore a demand for alternative algorithms to BP that could improve the latency, memory requirements, and energy footprint of neural networks on hardware. In this work, we propose a novel method based on Direct Feedback Alignment (DFA) which uses Forward-Mode Automatic Differentiation to estimate backpropagation paths and learn feedback connections in an online manner. We experimentally show that Directional DFA achieves performances that are closer to BP than other feedback methods on several benchmark datasets and architectures while benefiting from the locality and parallelization characteristics of DFA. Moreover, we show that, unlike other feedback learning algorithms, our method provides stable learning for convolution layers.
Exact Error Backpropagation Through Spikes for Precise Training of Spiking Neural Networks
Dec 15, 2022Event-based simulations of Spiking Neural Networks (SNNs) are fast and accurate. However, they are rarely used in the context of event-based gradient descent because their implementations on GPUs are difficult. Discretization with the forward Euler method is instead often used with gradient descent techniques but has the disadvantage of being computationally expensive. Moreover, the lack of precision of discretized simulations can create mismatches between the simulated models and analog neuromorphic hardware. In this work, we propose a new exact error-backpropagation through spikes method for SNNs, extending Fast \& Deep to multiple spikes per neuron. We show that our method can be efficiently implemented on GPUs in a fully event-based manner, making it fast to compute and precise enough for analog neuromorphic hardware. Compared to the original Fast \& Deep and the current state-of-the-art event-based gradient-descent algorithms, we demonstrate increased performance on several benchmark datasets with both feedforward and convolutional SNNs. In particular, we show that multi-spike SNNs can have advantages over single-spike networks in terms of convergence, sparsity, classification latency and sensitivity to the dead neuron problem.
Integrate-and-Fire Neurons for Low-Powered Pattern Recognition
Jun 28, 2021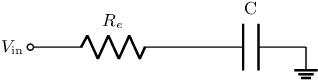

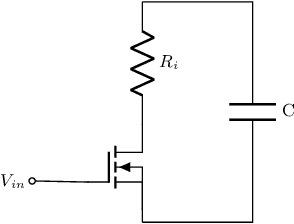

Embedded systems acquire information about the real world from sensors and process it to make decisions and/or for transmission. In some situations, the relationship between the data and the decision is complex and/or the amount of data to transmit is large (e.g. in biologgers). Artificial Neural Networks (ANNs) can efficiently detect patterns in the input data which makes them suitable for decision making or compression of information for data transmission. However, ANNs require a substantial amount of energy which reduces the lifetime of battery-powered devices. Therefore, the use of Spiking Neural Networks can improve such systems by providing a way to efficiently process sensory data without being too energy-consuming. In this work, we introduce a low-powered neuron model called Integrate-and-Fire which exploits the charge and discharge properties of the capacitor. Using parallel and series RC circuits, we developed a trainable neuron model that can be expressed in a recurrent form. Finally, we trained its simulation with an artificially generated dataset of dog postures and implemented it as hardware that showed promising energetic properties. This paper is the full text of the research, presented at the 20th International Conference on Artificial Intelligence and Soft Computing Web System (ICAISC 2021)