Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInverse Kinematics of Some General 6R/P Manipulators
Jun 11, 2019
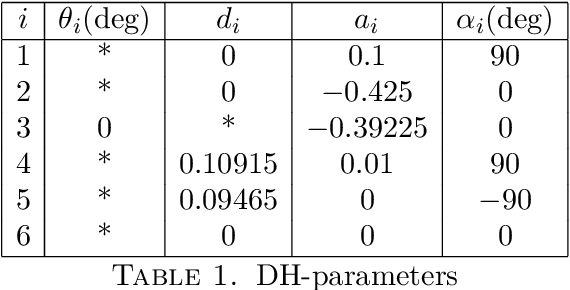

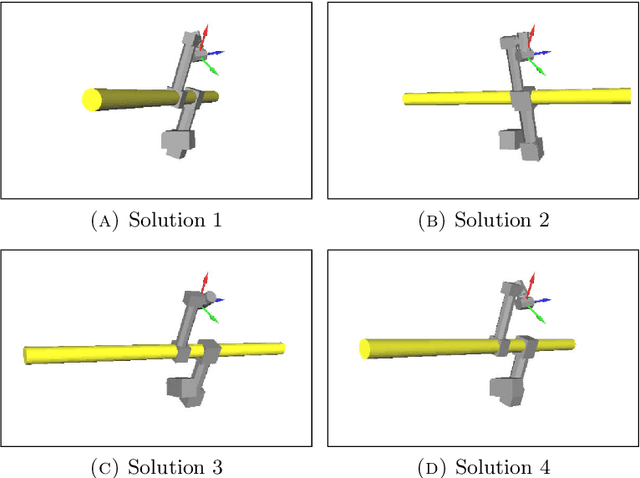
We develop an algorithm that solves the inverse kinematics of general serial 2RP3R, 2R2P2R, 3RP2R and 6R manipulators based on the HuPf algorithm. We identify the workspaces of the 3-subchains of the manipulator with a quasi-projective variety in $\mathbb{P}^7$ via dual quaternions. This allows us to compute linear forms that describe linear spaces containing the workspaces of these 3-subchains. We present numerical examples that illustrate the algorithm and show the real solutions.
* 11 pages, 9 figures
Via