 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA User Study on Explainable Online Reinforcement Learning for Adaptive Systems
Jul 09, 2023Online reinforcement learning (RL) is increasingly used for realizing adaptive systems in the presence of design time uncertainty. Online RL facilitates learning from actual operational data and thereby leverages feedback only available at runtime. However, Online RL requires the definition of an effective and correct reward function, which quantifies the feedback to the RL algorithm and thereby guides learning. With Deep RL gaining interest, the learned knowledge is no longer explicitly represented, but is represented as a neural network. For a human, it becomes practically impossible to relate the parametrization of the neural network to concrete RL decisions. Deep RL thus essentially appears as a black box, which severely limits the debugging of adaptive systems. We previously introduced the explainable RL technique XRL-DINE, which provides visual insights into why certain decisions were made at important time points. Here, we introduce an empirical user study involving 54 software engineers from academia and industry to assess (1) the performance of software engineers when performing different tasks using XRL-DINE and (2) the perceived usefulness and ease of use of XRL-DINE.
Explaining Online Reinforcement Learning Decisions of Self-Adaptive Systems
Oct 12, 2022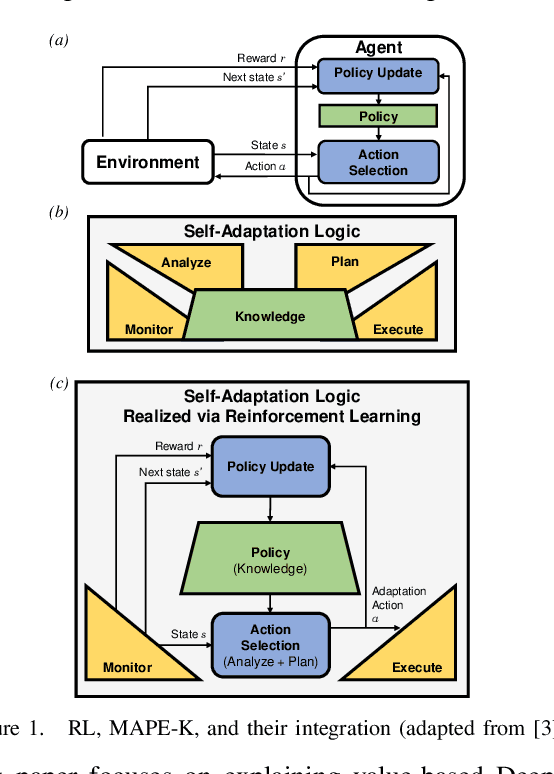
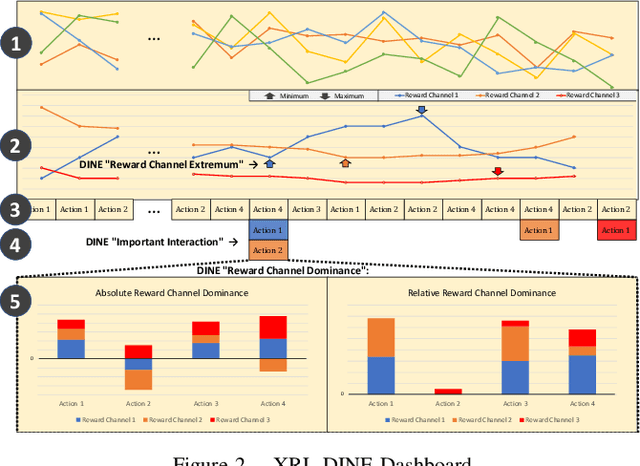
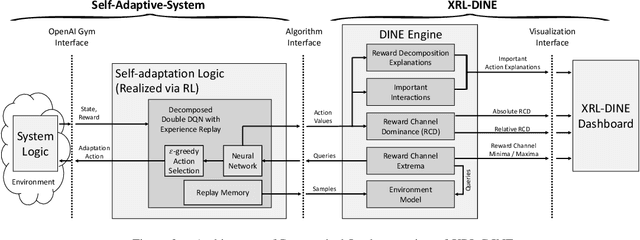
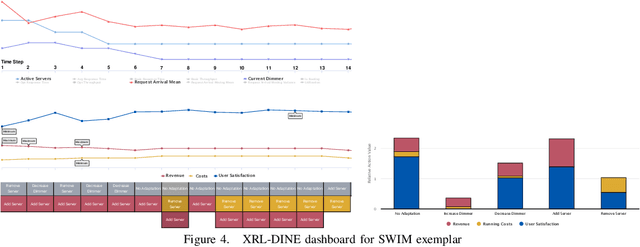
Design time uncertainty poses an important challenge when developing a self-adaptive system. As an example, defining how the system should adapt when facing a new environment state, requires understanding the precise effect of an adaptation, which may not be known at design time. Online reinforcement learning, i.e., employing reinforcement learning (RL) at runtime, is an emerging approach to realizing self-adaptive systems in the presence of design time uncertainty. By using Online RL, the self-adaptive system can learn from actual operational data and leverage feedback only available at runtime. Recently, Deep RL is gaining interest. Deep RL represents learned knowledge as a neural network whereby it can generalize over unseen inputs, as well as handle continuous environment states and adaptation actions. A fundamental problem of Deep RL is that learned knowledge is not explicitly represented. For a human, it is practically impossible to relate the parametrization of the neural network to concrete RL decisions and thus Deep RL essentially appears as a black box. Yet, understanding the decisions made by Deep RL is key to (1) increasing trust, and (2) facilitating debugging. Such debugging is especially relevant for self-adaptive systems, because the reward function, which quantifies the feedback to the RL algorithm, must be defined by developers. The reward function must be explicitly defined by developers, thus introducing a potential for human error. To explain Deep RL for self-adaptive systems, we enhance and combine two existing explainable RL techniques from the machine learning literature. The combined technique, XRL-DINE, overcomes the respective limitations of the individual techniques. We present a proof-of-concept implementation of XRL-DINE, as well as qualitative and quantitative results of applying XRL-DINE to a self-adaptive system exemplar.