 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniversal Hysteresis Identification Using Extended Preisach Neural Network
Dec 22, 2019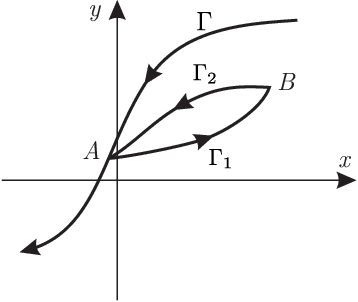
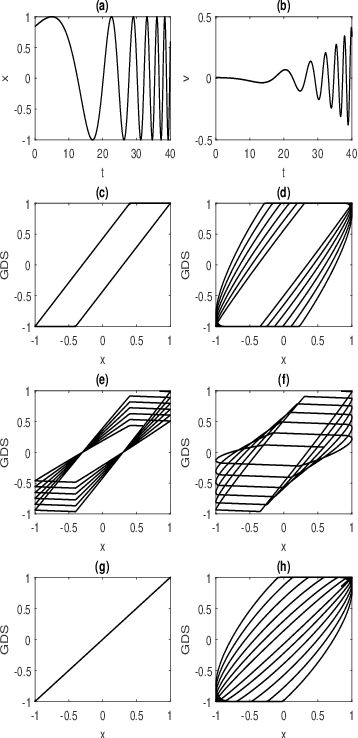
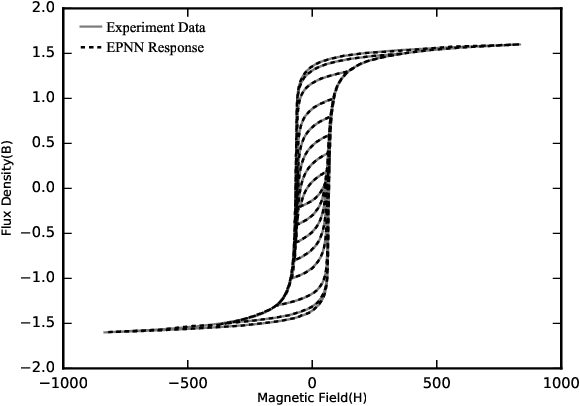
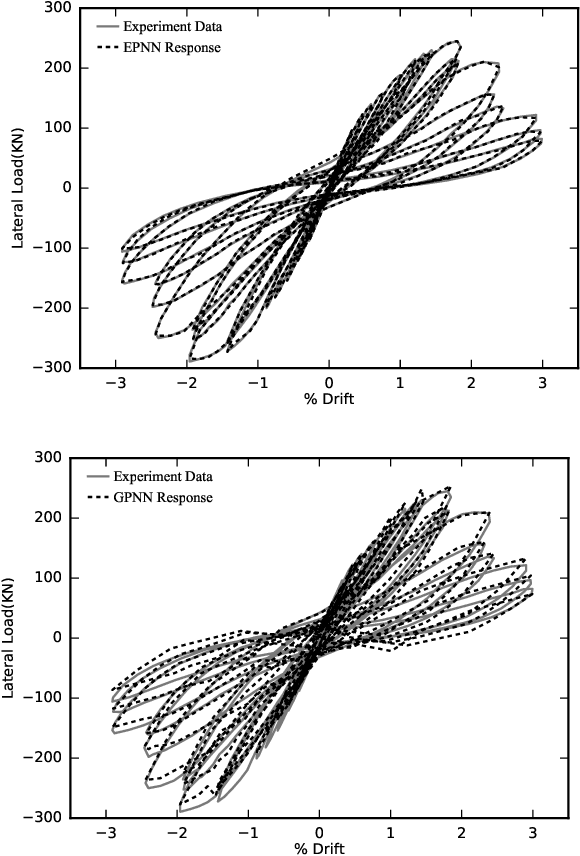
Hysteresis phenomena have been observed in different branches of physics and engineering sciences. Therefore, several models have been proposed for hysteresis simulation in different fields; however, almost neither of them can be utilized universally. In this paper by inspiring of Preisach Neural Network which was inspired by the Preisach model that basically stemmed from Madelungs rules and using the learning capability of the neural networks, an adaptive universal model for hysteresis is introduced and called Extended Preisach Neural Network Model. It is comprised of input, output and, two hidden layers. The input and output layers contain linear neurons while the first hidden layer incorporates neurons called Deteriorating Stop neurons, which their activation function follows Deteriorating Stop operator. Deteriorating Stop operators can generate non-congruent hysteresis loops. The second hidden layer includes Sigmoidal neurons. Adding the second hidden layer, helps the neural network learn non-Masing and asymmetric hysteresis loops very smoothly. At the input layer, besides input data the rate at which input data changes, is included as well in order to give the model the capability of learning rate-dependent hysteresis loops. Hence, the proposed approach has the capability of the simulation of both rate-independent and rate-dependent hysteresis with either congruent or non-congruent loops as well as symmetric and asymmetric loops. A new hybridized algorithm has been adopted for training the model which is based on a combination of the Genetic Algorithm and the optimization method of sub-gradient with space dilatation. The generality of the proposed model has been evaluated by applying it to various hysteresis from different areas of engineering with different characteristics. The results show that the model is successful in the identification of the considered hystereses.
Lidar based Detection and Classification of Pedestrians and Vehicles Using Machine Learning Methods
Jun 12, 2019
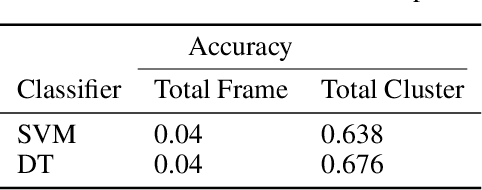

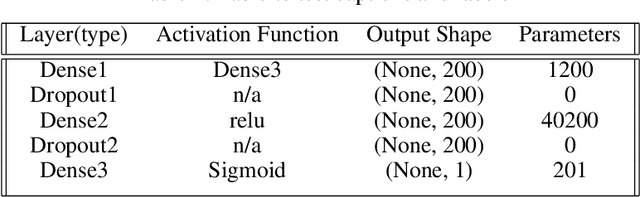
The goal of this paper is to classify objects mapped by LiDAR sensor into different classes such as vehicles, pedestrians and bikers. Utilizing a LiDAR-based object detector and Neural Networks-based classifier, a novel real-time object detection is presented essentially with respect to aid self-driving vehicles in recognizing and classifying other objects encountered in the course of driving and proceed accordingly. We discuss our work using machine learning methods to tackle a common high-level problem found in machine learning applications for self-driving cars: the classification of pointcloud data obtained from a 3D LiDAR sensor.