 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Activity Recognition for Adaptive Worker-Robot Interaction using Transfer Learning
Aug 28, 2023



Human activity recognition (HAR) using machine learning has shown tremendous promise in detecting construction workers' activities. HAR has many applications in human-robot interaction research to enable robots' understanding of human counterparts' activities. However, many existing HAR approaches lack robustness, generalizability, and adaptability. This paper proposes a transfer learning methodology for activity recognition of construction workers that requires orders of magnitude less data and compute time for comparable or better classification accuracy. The developed algorithm transfers features from a model pre-trained by the original authors and fine-tunes them for the downstream task of activity recognition in construction. The model was pre-trained on Kinetics-400, a large-scale video-based human activity recognition dataset with 400 distinct classes. The model was fine-tuned and tested using videos captured from manual material handling (MMH) activities found on YouTube. Results indicate that the fine-tuned model can recognize distinct MMH tasks in a robust and adaptive manner which is crucial for the widespread deployment of collaborative robots in construction.
Automated Estimation of Construction Equipment Emission using Inertial Sensors and Machine Learning Models
Sep 27, 2021

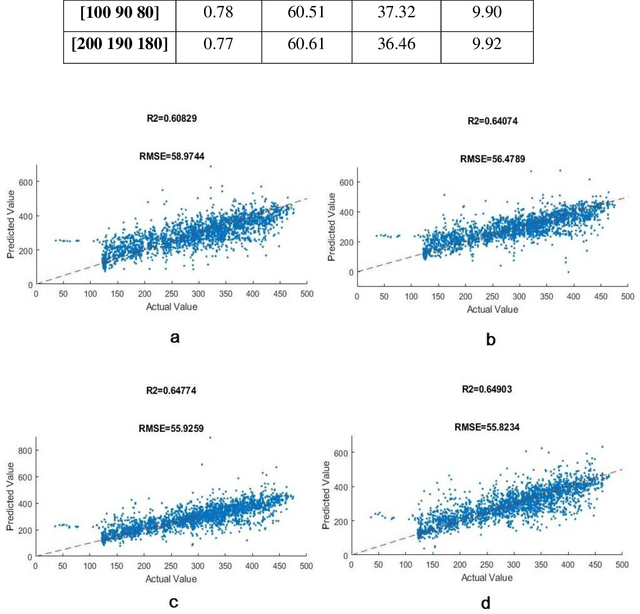

The construction industry is one of the main producers of greenhouse gasses (GHG). Quantifying the amount of air pollutants including GHG emissions during a construction project has become an additional project objective to traditional metrics such as time, cost, and safety in many parts of the world. A major contributor to air pollution during construction is the use of heavy equipment and thus their efficient operation and management can substantially reduce the harm to the environment. Although the on-road vehicle emission prediction is a widely researched topic, construction equipment emission measurement and reduction have received very little attention. This paper describes the development and deployment of a novel framework that uses machine learning (ML) methods to predict the level of emissions from heavy construction equipment monitored via an Internet of Things (IoT) system comprised of accelerometer and gyroscope sensors. The developed framework was validated using an excavator performing real-world construction work. A portable emission measurement system (PEMS) was employed along with the inertial sensors to record data including the amount of CO, NOX, CO2, SO2, and CH4 pollutions emitted by the equipment. Different ML algorithms were developed and compared to identify the best model to predict emission levels from inertial sensors data. The results showed that Random Forest with the coefficient of determination (R2) of 0.94, 0.91 and 0.94 for CO, NOX, CO2, respectively was the best algorithm among different models evaluated in this study.