Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTeam Applied Robotics: A closer look at our robotic picking system
Jul 23, 2017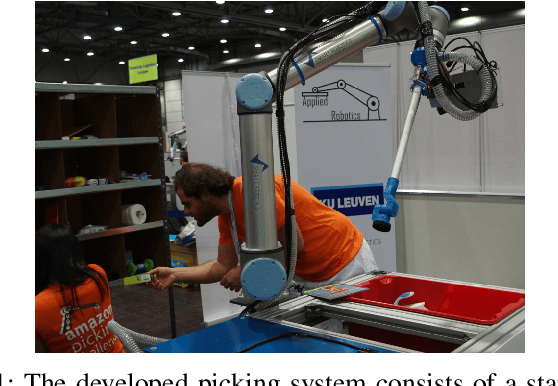
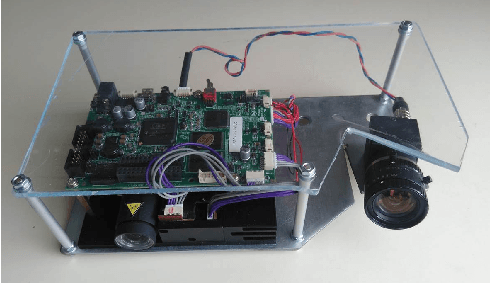
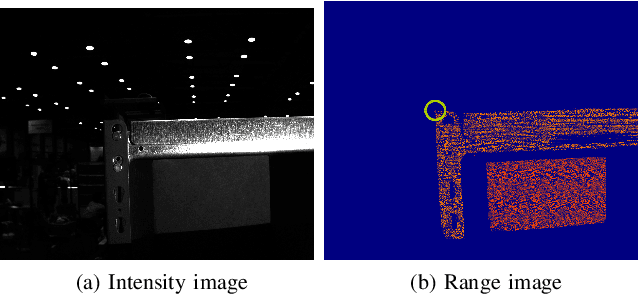
This paper describes the vision based robotic picking system that was developed by our team, Team Applied Robotics, for the Amazon Picking Challenge 2016. This competition challenged teams to develop a robotic system that is able to pick a large variety of products from a shelve or a tote. We discuss the design considerations and our strategy, the high resolution 3D vision system, the use of a combination of texture and shape-based object detection algorithms, the robot path planning and object manipulators that were developed.
* IEEE International Conference on Robotics and Automation (ICRA),
Warehouse Picking Automation Workshop, May 29 to June 3, 2017, Singapore
Via