 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePeacock Exploration: A Lightweight Exploration for UAV using Control-Efficient Trajectory
Dec 29, 2020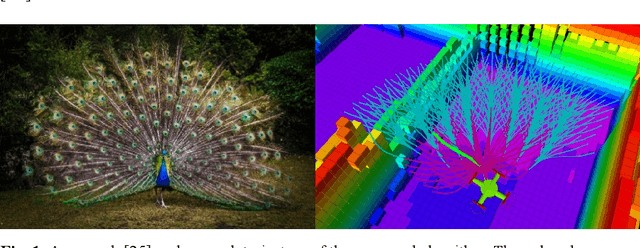
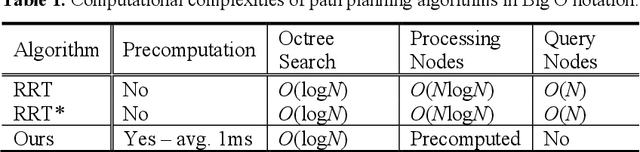
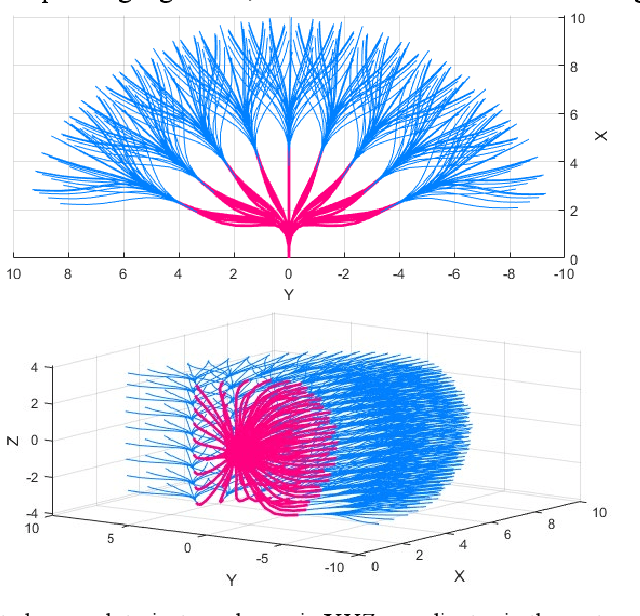
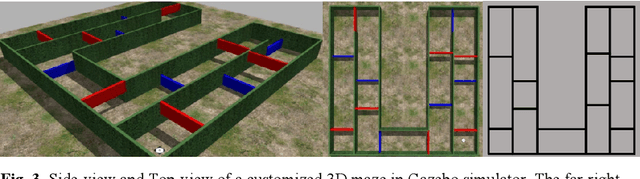
Unmanned Aerial Vehicles have received much attention in recent years due to its wide range of applications, such as exploration of an unknown environment to acquire a 3D map without prior knowledge of it. Existing exploration methods have been largely challenged by computationally heavy probabilistic path planning. Similarly, kinodynamic constraints or proper sensors considering the payload for UAVs were not considered. In this paper, to solve those issues and to consider the limited payload and computational resource of UAVs, we propose "Peacock Exploration": A lightweight exploration method for UAVs using precomputed minimum snap trajectories which look like a peacock's tail. Using the widely known, control efficient minimum snap trajectories and OctoMap, the UAV equipped with a RGB-D camera can explore unknown 3D environments without any prior knowledge or human-guidance with only O(logN) computational complexity. It also adopts the receding horizon approach and simple, heuristic scoring criteria. The proposed algorithm's performance is demonstrated by exploring a challenging 3D maze environment and compared with a state-of-the-art algorithm.