 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Folded Pneumatic Artificial Muscle (foldPAM): Towards Programmability and Control via End Geometry
Sep 03, 2022

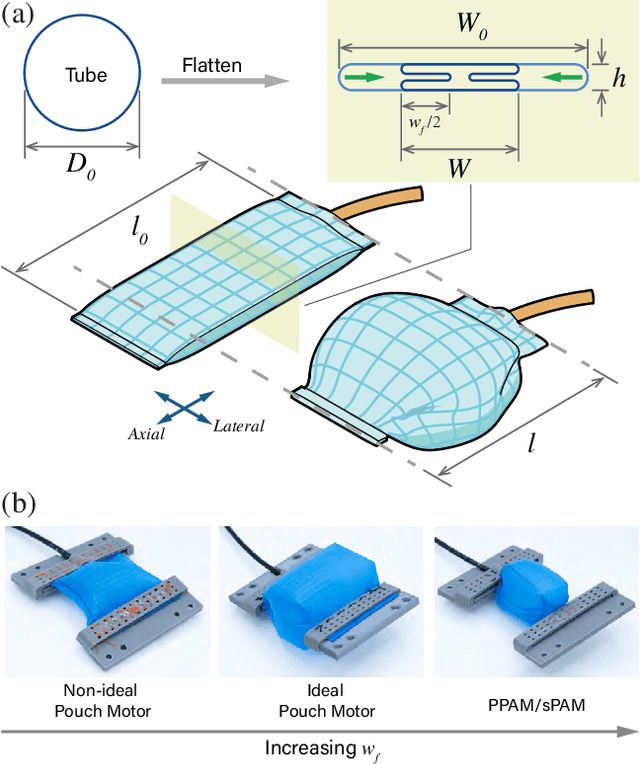
Soft pneumatic actuators have seen applications in many soft robotic systems, and their pressure-driven nature presents unique challenges and opportunities for controlling their motion. In this work, we present a new concept: designing and controlling pneumatic actuators via end geometry. We demonstrate a novel actuator class, named the folded Pneumatic Artificial Muscle (foldPAM), which features a thin-filmed air pouch that is symmetrically folded on each side. Varying the folded portion of the actuator changes the end constraints and, hence, the force-strain relationships. We investigated this change experimentally by measuring the force-strain relationship of individual foldPAM units with various lengths and amounts of folding. In addition to static-geometry units, an actuated foldPAM device was designed to produce continuous, on-demand adjustment of the end geometry, enabling closed-loop position control while maintaining constant pressure. Experiments with the device indicate that geometry control allows access to different areas on the force-strain plane and that closed-loop geometry control can achieve errors within 0.5% of the actuation range.