 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning a Directional Soft Lane Affordance Model for Road Scenes Using Self-Supervision
Feb 17, 2020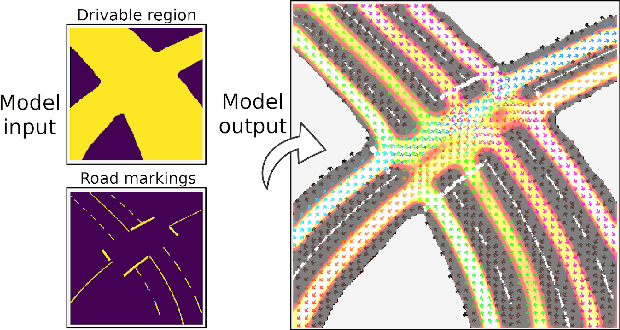

Humans navigate complex environments in an organized yet flexible manner, adapting to the context and implicit social rules. Understanding these naturally learned patterns of behavior is essential for applications such as autonomous vehicles. However, algorithmically defining these implicit rules of human behavior remains difficult. This work proposes a novel self-supervised method for training a probabilistic network model to estimate the regions humans are most likely to drive in as well as a multimodal representation of the inferred direction of travel at each point. The model is trained on individual human trajectories conditioned on a representation of the driving environment. The model is shown to successfully generalize to new road scenes, demonstrating potential for real-world application as a prior for socially acceptable driving behavior in challenging or ambiguous scenarios which are poorly handled by explicit traffic rules.