 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTEACHING -- Trustworthy autonomous cyber-physical applications through human-centred intelligence
Jul 14, 2021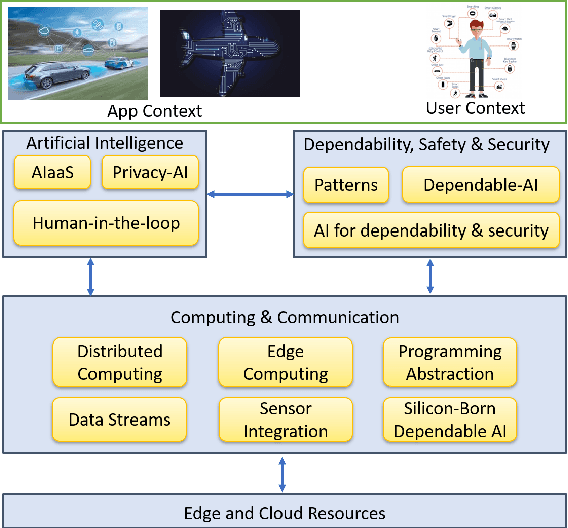
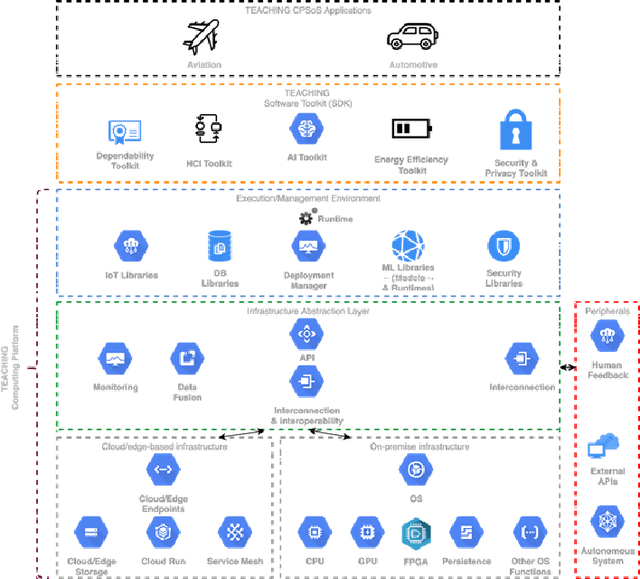
This paper discusses the perspective of the H2020 TEACHING project on the next generation of autonomous applications running in a distributed and highly heterogeneous environment comprising both virtual and physical resources spanning the edge-cloud continuum. TEACHING puts forward a human-centred vision leveraging the physiological, emotional, and cognitive state of the users as a driver for the adaptation and optimization of the autonomous applications. It does so by building a distributed, embedded and federated learning system complemented by methods and tools to enforce its dependability, security and privacy preservation. The paper discusses the main concepts of the TEACHING approach and singles out the main AI-related research challenges associated with it. Further, we provide a discussion of the design choices for the TEACHING system to tackle the aforementioned challenges
Development Framework for Longitudinal Automated Driving Functions with Off-board Information Integration
Jun 18, 2019

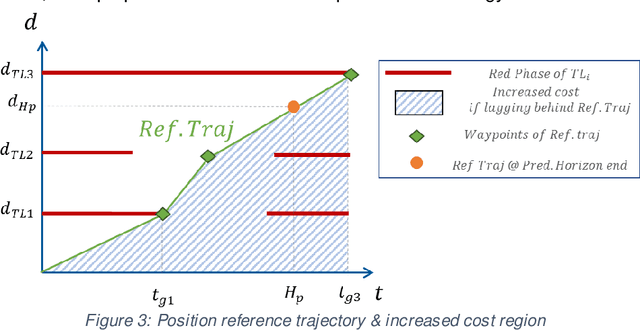
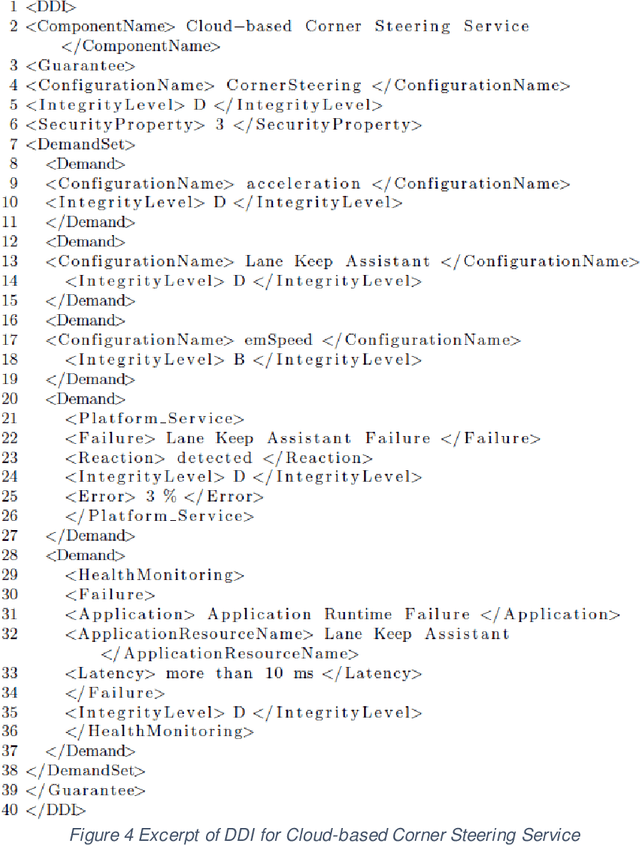
Increasingly sophisticated function development is taking place with the aim of developing efficient, safe and increasingly Automated Driving Functions. This development is possible with the use of diverse data from sources such as Navigation Systems, eHorizon, on-board sensor data, Vehicle-to-Infrastructure (V2I) and Vehicle-to-Vehicle (V2V) communication. Increasing challenges arise with the dependency on large amounts of real-time data coming from off-board sources. At the core of addressing these challenges lies the concept of a Digital Dependability Identity (DDI) of a component or system. DDIs are modular, composable, and executable components in the field, facilitating: $\bullet$ efficient synthesis of component and system dependability information, $\bullet$ effective evaluation of information for safe and secure composition of highly distributed and autonomous Cyber Physical Systems. In AVL's Connected Powertrain (TM), Automated Driving Functions are tailored to Powertrain Control Strategies that predictively increase energy efficiency according to the powertrain type and its component efficiencies. Simultaneously, the burden on the driver is reduced by optimizing the vehicle velocity, whilst minimizing any journey time penalty.In this work, the development of dependable Automated Driving Functions is exemplified by the Traffic Light Assistant, an adaptive strategy that utilizes predictions of preceding traffic, upcoming road curvature, inclination, speed limits, and especially traffic light signal phase and timing information to increase the energy efficiency in an urban traffic environment. A key aspect of this development is the possibility for seamless and simultaneous development; from office simulation to human-in-the-loop and to real-time tests that include vehicle and powertrain hardware. Driver's acceptance and comfort is rated in an advanced diver simulator mounted on a hexapod, capable of emulating longitudinal and lateral acceleration of a real vehicle. Test results from real-time function validation on a Powertrain Testbed are shown, including real traffic light signal phasing information and traffic flow representation on Graz city roads.