 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA possibilistic framework for multi-target multi-sensor fusion
Sep 25, 2022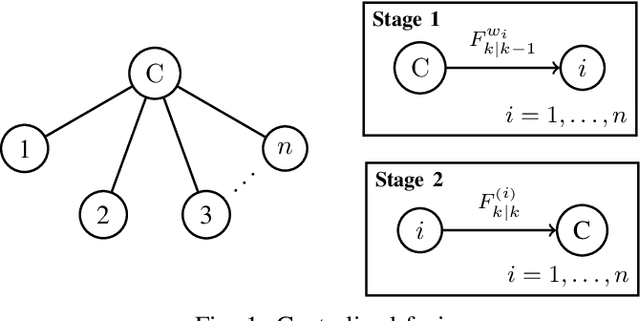
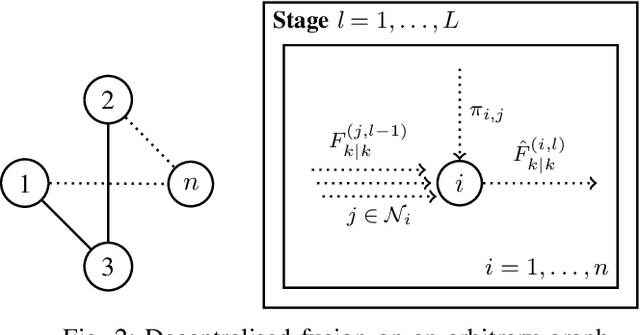

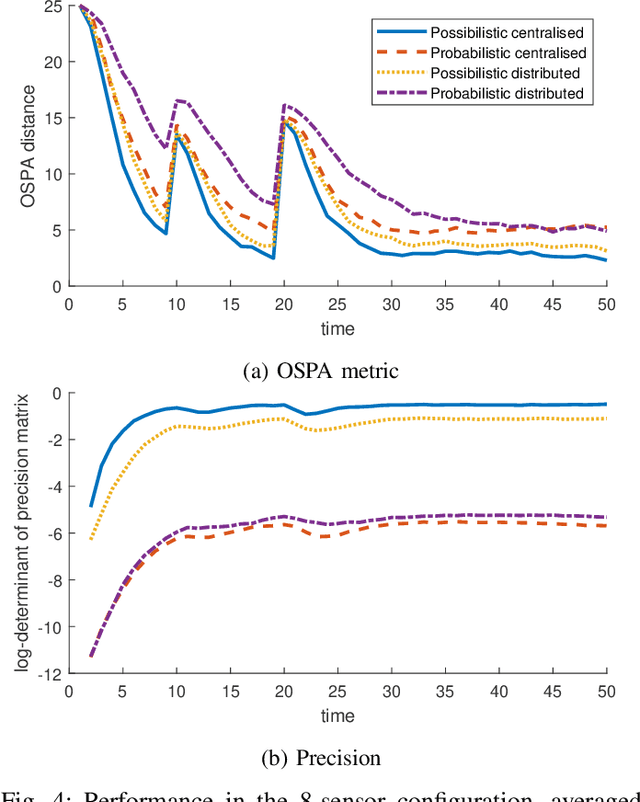
Fusing and sharing information from multiple sensors over a network is a challenging task, especially in the context of multi-target tracking. Part of this challenge arises from the absence of a foundational rule for fusing probability distributions, with various approaches stemming from different principles. Yet, when expressing multi-target tracking algorithms within the framework of possibility theory, one specific fusion rule appears to be particularly natural and useful. In this article, this fusion rule is applied to both centralised and decentralised fusion, based on the possibilistic analogue of the probability hypothesis density filter. We then show that the proposed approach outperforms its probabilistic counterpart on simulated data.