 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssessing Low Back Movement with Motion Tape Sensor Data Through Deep Learning
Feb 12, 2026Back pain is a pervasive issue affecting a significant portion of the population, often worsened by certain movements of the lower back. Assessing these movements is important for helping clinicians prescribe appropriate physical therapy. However, it can be difficult to monitor patients' movements remotely outside the clinic. High-fidelity data from motion capture sensors can be used to classify different movements, but these sensors are costly and impractical for use in free-living environments. Motion Tape (MT), a new fabric-based wearable sensor, addresses these issues by being low cost and portable. Despite these advantages, novelty and variability in sensor stability make the MT dataset small scale and inherent to noise. In this work, we propose the Motion-Tape Augmentation Inference Model (MT-AIM), a deep learning classification pipeline trained on MT data. In order to address the challenges of limited sample size and noise present within the MT dataset, MT-AIM leverages conditional generative models to generate synthetic MT data of a desired movement, as well as predicting joint kinematics as additional features. This combination of synthetic data generation and feature augmentation enables MT-AIM to achieve state-of-the-art accuracy in classifying lower back movements, bridging the gap between physiological sensing and movement analysis.
Feedback and Control of Dynamics and Robotics using Augmented Reality
Mar 23, 2023Human-machine interaction (HMI) and human-robot interaction (HRI) can assist structural monitoring and structural dynamics testing in the laboratory and field. In vibratory experimentation, one mode of generating vibration is to use electrodynamic exciters. Manual control is a common way of setting the input of the exciter by the operator. To measure the structural responses to these generated vibrations sensors are attached to the structure. These sensors can be deployed by repeatable robots with high endurance, which require on-the-fly control. If the interface between operators and the controls was augmented, then operators can visualize the experiments, exciter levels, and define robot input with a better awareness of the area of interest. Robots can provide better aid to humans if intelligent on-the-fly control of the robot is: (1) quantified and presented to the human; (2) conducted in real-time for human feedback informed by data. Information provided by the new interface would be used to change the control input based on their understanding of real-time parameters. This research proposes using Augmented Reality (AR) applications to provide humans with sensor feedback and control of actuators and robots. This method improves cognition by allowing the operator to maintain awareness of structures while adjusting conditions accordingly with the assistance of the new real-time interface. One interface application is developed to plot sensor data in addition to voltage, frequency, and duration controls for vibration generation. Two more applications are developed under similar framework, one to control the position of a mediating robot and one to control the frequency of the robot movement. This paper presents the proposed model for the new control loop and then compares the new approach with a traditional method by measuring time delay in control input and user efficiency.
Reducing Gaze Distraction for Real-time Vibration Monitoring Using Augmented Reality
Oct 06, 2021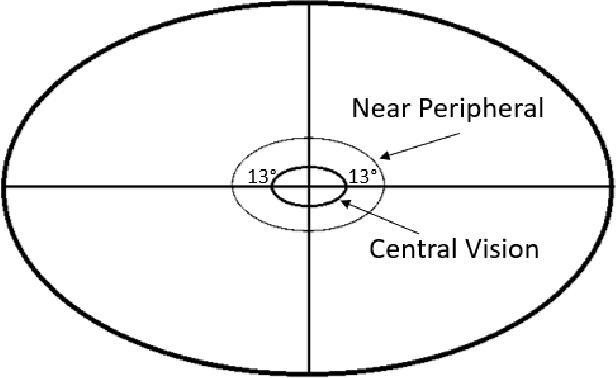
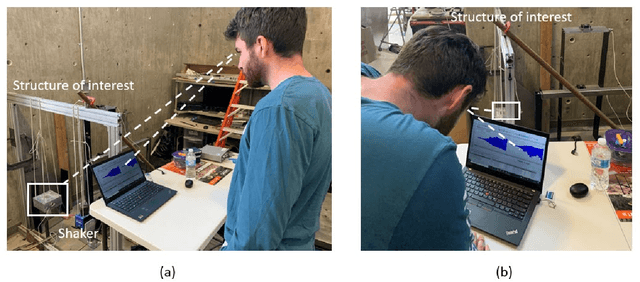

Operators want to maintain awareness of the structure being tested while observing sensor data. Normally the human's gaze shifts to a separate device or screen during the experiment for data information, missing the structure's physical response. The human-computer interaction provides valuable data and information but separates the human from the reality. The sensor data does not collect experiment safety, quality, and other contextual information of critical value to the operator. To solve this problem, this research provides humans with real-time information about vibrations using an Augmented Reality (AR) application. An application is developed to augment sensor data on top of the area of interest, which allows the user to perceive real-time changes that the data may not warn of. This paper presents the results of an experiment that show how AR can provide a channel for direct sensor feedback while increasing awareness of reality. In the experiment a researcher attempts to closely follow a moving sensor with their own sensor while observing the moving sensor's data with and without AR. The results of the reported experiment indicate that augmenting the information collected from sensors in real-time narrows the operator's focus to the structure of interest for more efficient and informed experimentation.