 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Knowledge-Graph Translation Layer for Mission-Aware Multi-Agent Path Planning in Spatiotemporal Dynamics
Oct 24, 2025The coordination of autonomous agents in dynamic environments is hampered by the semantic gap between high-level mission objectives and low-level planner inputs. To address this, we introduce a framework centered on a Knowledge Graph (KG) that functions as an intelligent translation layer. The KG's two-plane architecture compiles declarative facts into per-agent, mission-aware ``worldviews" and physics-aware traversal rules, decoupling mission semantics from a domain-agnostic planner. This allows complex, coordinated paths to be modified simply by changing facts in the KG. A case study involving Autonomous Underwater Vehicles (AUVs) in the Gulf of Mexico visually demonstrates the end-to-end process and quantitatively proves that different declarative policies produce distinct, high-performing outcomes. This work establishes the KG not merely as a data repository, but as a powerful, stateful orchestrator for creating adaptive and explainable autonomous systems.
Physics-Informed Neural Network Surrogate Models for River Stage Prediction
Mar 21, 2025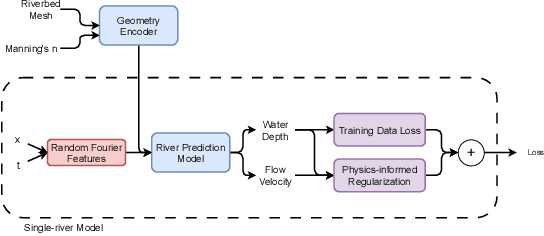
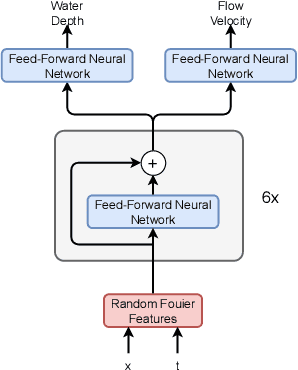
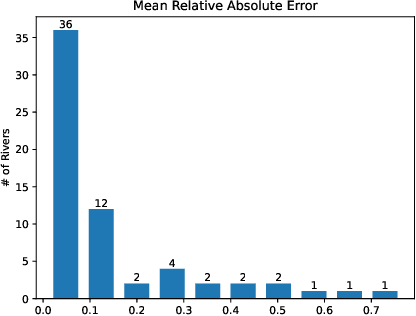
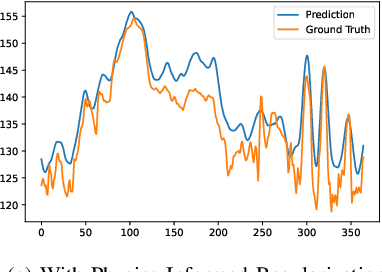
This work investigates the feasibility of using Physics-Informed Neural Networks (PINNs) as surrogate models for river stage prediction, aiming to reduce computational cost while maintaining predictive accuracy. Our primary contribution demonstrates that PINNs can successfully approximate HEC-RAS numerical solutions when trained on a single river, achieving strong predictive accuracy with generally low relative errors, though some river segments exhibit higher deviations. By integrating the governing Saint-Venant equations into the learning process, the proposed PINN-based surrogate model enforces physical consistency and significantly improves computational efficiency compared to HEC-RAS. We evaluate the model's performance in terms of accuracy and computational speed, demonstrating that it closely approximates HEC-RAS predictions while enabling real-time inference. These results highlight the potential of PINNs as effective surrogate models for single-river hydrodynamics, offering a promising alternative for computationally efficient river stage forecasting. Future work will explore techniques to enhance PINN training stability and robustness across a more generalized multi-river model.
Data Visualization to Evaluate and Facilitate Targeted Data Acquisitions in Support of a Real-time Ocean Forecasting System
Sep 20, 2024



A robust evaluation toolset has been designed for Naval Research Laboratory's Real-Time Ocean Forecasting System RELO with the purpose of facilitating an adaptive sampling strategy and providing more educated guidance for routing underwater gliders. The major challenges are to integrate into the existing operational system and provide a bridge between the modeling and operative environments. Visualization is the selected approach, and the developed software is divided into 3 packages. The first package verifies that the glider is actually following the waypoints and predicts the position of the glider for the next cycle's instructions. The second package ensures that the delivered waypoints are both useful and feasible. The third package provides the confidence levels for the suggested path. This software's implementation is in Python for portability and modularity to allow for easy expansion of new visuals.