 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEncouraging Human Interaction with Robot Teams: Legible and Fair Subtask Allocations
May 06, 2022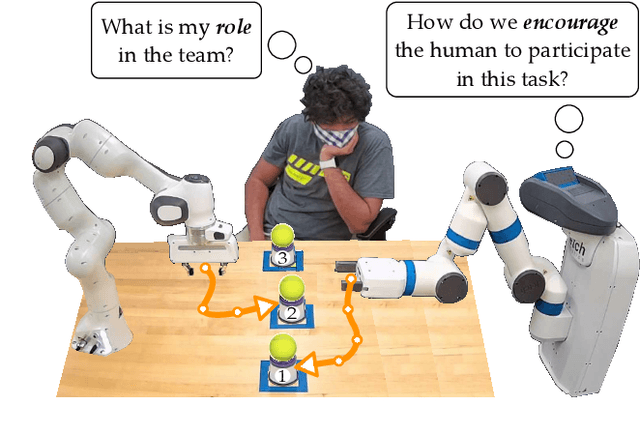
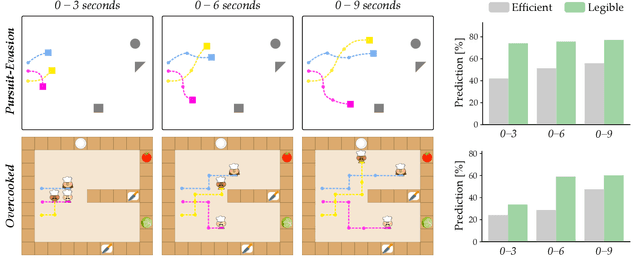
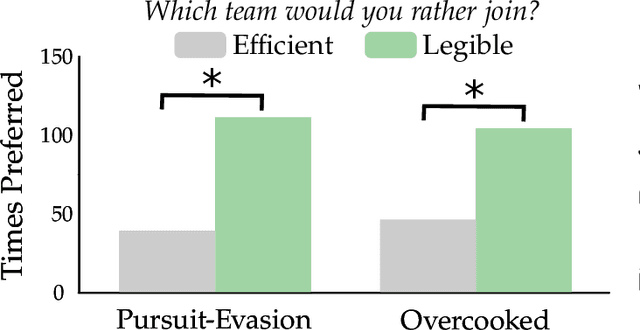
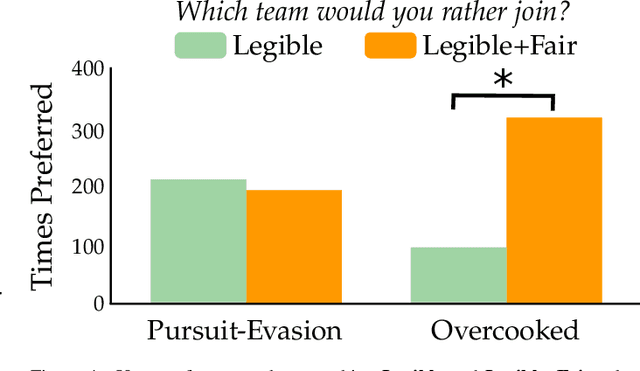
Recent works explore collaboration between humans and teams of robots. These approaches make sense if the human is already working with the robot team; but how should robots encourage nearby humans to join their teams in the first place? Inspired by behavioral economics, we recognize that humans care about more than just team efficiency -- humans also have biases and expectations for team dynamics. Our hypothesis is that the way inclusive robots divide the task (i.e., how the robots split a larger task into subtask allocations) should be both legible and fair to the human partner. In this paper we introduce a bilevel optimization approach that enables robot teams to identify high-level subtask allocations and low-level trajectories that optimize for legibility, fairness, or a combination of both objectives. We then test our resulting algorithm across studies where humans watch or play with robot teams. We find that our approach to generating legible teams makes the human's role clear, and that humans typically prefer to join and collaborate with legible teams instead of teams that only optimize for efficiency. Incorporating fairness alongside legibility further encourages participation: when humans play with robots, we find that they prefer (potentially inefficient) teams where the subtasks or effort are evenly divided. See videos of our studies here https://youtu.be/cfN7O5na3mg