 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl and Coordination of a SWARM of Unmanned Surface Vehicles using Deep Reinforcement Learning in ROS
Apr 17, 2023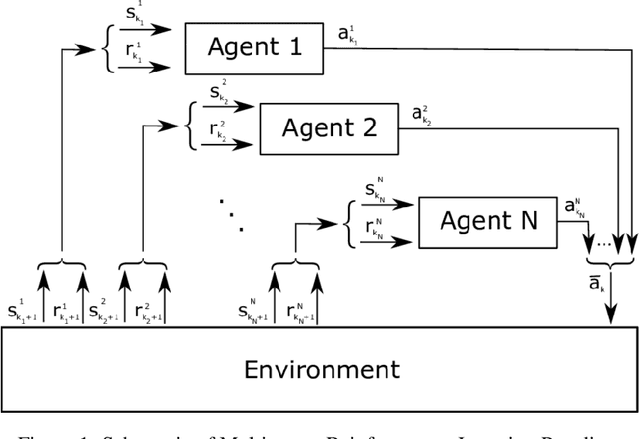
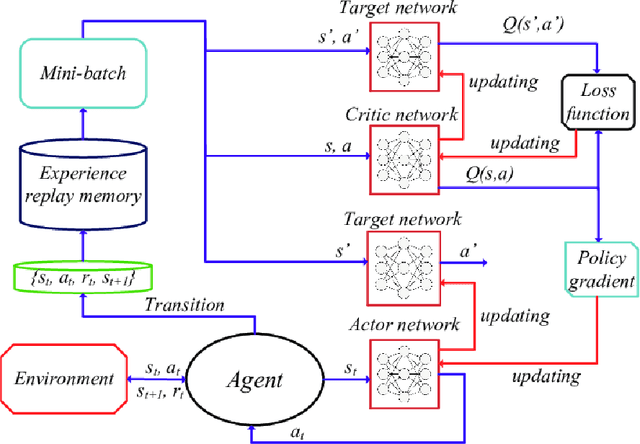
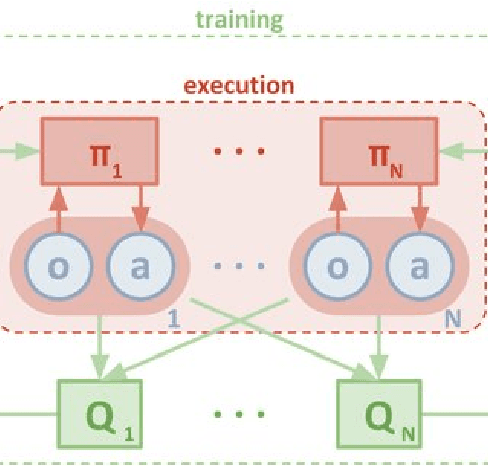
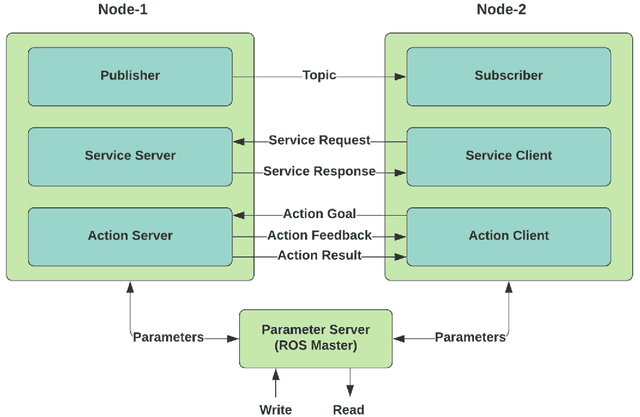
An unmanned surface vehicle (USV) can perform complex missions by continuously observing the state of its surroundings and taking action toward a goal. A SWARM of USVs working together can complete missions faster, and more effectively than a single USV alone. In this paper, we propose an autonomous communication model for a swarm of USVs. The goal of this system is to implement a software system using Robot Operating System (ROS) and Gazebo. With the main objective of coordinated task completion, the Markov decision process (MDP) provides a base to formulate a task decision problem to achieve efficient localization and tracking in a highly dynamic water environment. To coordinate multiple USVs performing real-time target tracking, we propose an enhanced multi-agent reinforcement learning approach. Our proposed scheme uses MA-DDPG, or Multi-Agent Deep Deterministic Policy Gradient, an extension of the Deep Deterministic Policy Gradients (DDPG) algorithm that allows for decentralized control of multiple agents in a cooperative environment. MA-DDPG's decentralised control allows each and every agent to make decisions based on its own observations and objectives, which can lead to superior gross performance and improved stability. Additionally, it provides communication and coordination among agents through the use of collective readings and rewards.
AI driven shadow model detection in agropv farms
Apr 16, 2023Agro-photovoltaic (APV) is a growing farming practice that combines agriculture and solar photovoltaic projects within the same area. This emerging market is expected to experience significant growth in the next few years, with a projected investment of $9 billion in 2030. Identifying shadows is crucial to understanding the APV environment, as they impact plant growth, microclimate, and evapotranspiration. In this study, we use state-of-the-art CNN and GAN-based neural networks to detect shadows in agro-PV farms, demonstrating their effectiveness. However, challenges remain, including partial shadowing from moving objects and real-time monitoring. Future research should focus on developing more sophisticated neural network-based shadow detection algorithms and integrating them with control systems for APV farms. Overall, shadow detection is crucial to increase productivity and profitability while supporting the environment, soil, and farmers.