 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuroevolution of a Recurrent Neural Network for Spatial and Working Memory in a Simulated Robotic Environment
Feb 25, 2021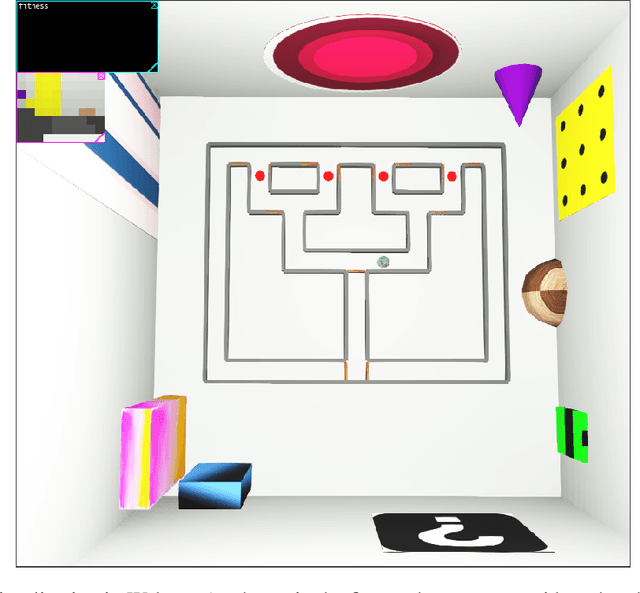
Animals ranging from rats to humans can demonstrate cognitive map capabilities. We evolved weights in a biologically plausible recurrent neural network (RNN) using an evolutionary algorithm to replicate the behavior and neural activity observed in rats during a spatial and working memory task in a triple T-maze. The rat was simulated in the Webots robot simulator and used vision, distance and accelerometer sensors to navigate a virtual maze. After evolving weights from sensory inputs to the RNN, within the RNN, and from the RNN to the robot's motors, the Webots agent successfully navigated the space to reach all four reward arms with minimal repeats before time-out. Our current findings suggest that it is the RNN dynamics that are key to performance, and that performance is not dependent on any one sensory type, which suggests that neurons in the RNN are performing mixed selectivity and conjunctive coding. Moreover, the RNN activity resembles spatial information and trajectory-dependent coding observed in the hippocampus. Collectively, the evolved RNN exhibits navigation skills, spatial memory, and working memory. Our method demonstrates how the dynamic activity in evolved RNNs can capture interesting and complex cognitive behavior and may be used to create RNN controllers for robotic applications.