 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman Following Based on Visual Perception in the Context of Warehouse Logistics
Jan 08, 2023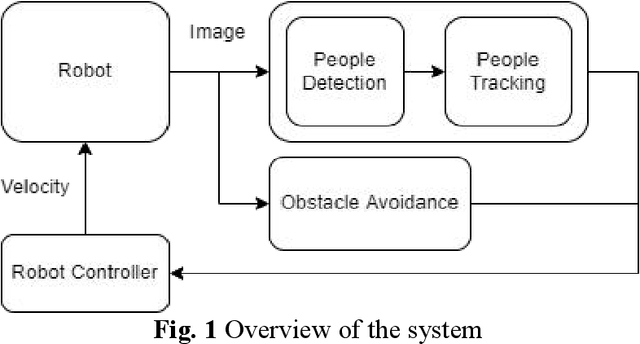
Under the background of 5G, Internet, artificial intelligence technol,ogy and robot technology, warehousing, and logistics robot technology has developed rapidly, and products have been widely used. A practical application is to help warehouse personnel pick up or deliver heavy goods at dispersed locations based on dynamic routes. However, programs that can only accept instructions or pre-set by the system do not have more flexibility, but existing human auto-following techniques either cannot accurately identify specific targets or require a combination of lasers and cameras that are cumbersome and do not accomplish obstacle avoidance well. This paper proposed an algorithm that combines DeepSort and a width-based tracking module to track targets and use artificial potential field local path planning to avoid obstacles. The evaluation is performed in a self-designed flat bounded test field and simulated in ROS. Our method achieves the SOTA results on following and successfully reaching the end-point without hitting obstacles.