 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnimal Behavior Analysis Methods Using Deep Learning: A Survey
May 22, 2024



Animal behavior serves as a reliable indicator of the adaptation of organisms to their environment and their overall well-being. Through rigorous observation of animal actions and interactions, researchers and observers can glean valuable insights into diverse facets of their lives, encompassing health, social dynamics, ecological relationships, and neuroethological dimensions. Although state-of-the-art deep learning models have demonstrated remarkable accuracy in classifying various forms of animal data, their adoption in animal behavior studies remains limited. This survey article endeavors to comprehensively explore deep learning architectures and strategies applied to the identification of animal behavior, spanning auditory, visual, and audiovisual methodologies. Furthermore, the manuscript scrutinizes extant animal behavior datasets, offering a detailed examination of the principal challenges confronting this research domain. The article culminates in a comprehensive discussion of key research directions within deep learning that hold potential for advancing the field of animal behavior studies.
Design of magnetic coupling-based anti-biofouling mechanism for underwater optical sensors
Jan 28, 2022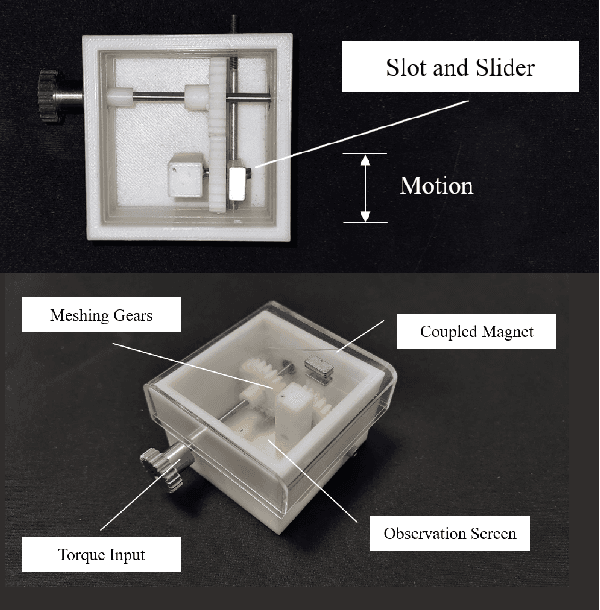
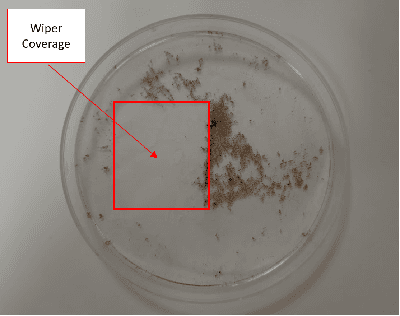
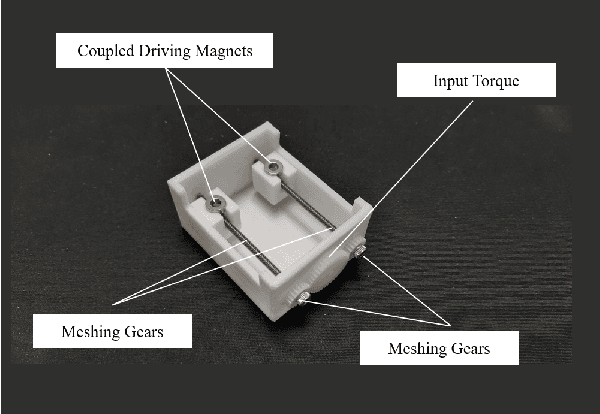
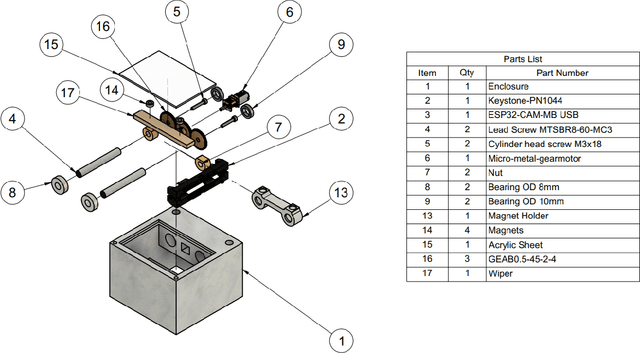
Water monitoring is crucial for environmental monitoring, transportation, energy and telecommunication. One of the main problems in aquatic environmental monitoring is biofouling. The simplest method among the current antifouling strategies is the use of wiper technologies like brushes and wipers which apply mechanical pressure. In designing built-in strategies however, manufacturers usually build the sensor around the biofouling system. The current state-of-the-art is a fully integrated central wiper in the sensor that enables cleaning of all probes mounted on the sonde. Improvements in antifouling strategies lag rapid advancements in sensor technologies such as in miniaturization, specialization, and costs. Hence, improving built-in designs by decreasing size and complexity will decrease maintenance and overall costs. This design is targeted for the EU project Robocoenosis since bio-hybrid systems in this project incorporate living organisms. This technology targets selective proliferation of the organisms which only prevents biofilms on components where they are unwanted. Beyond this, the use of autonomous activation based on image processing may likely be advantageous for minimizing the need for human inspection and maintenance. In addition to Robocoenosis, we also aim at incorporating this design in another project entitled Heterogeneous Swarm of Underwater Autonomous Vehicles where a swarm of heterogeneous underwater robotic fish is being developed.