 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Agnostic Morphology Evolution
Feb 25, 2021

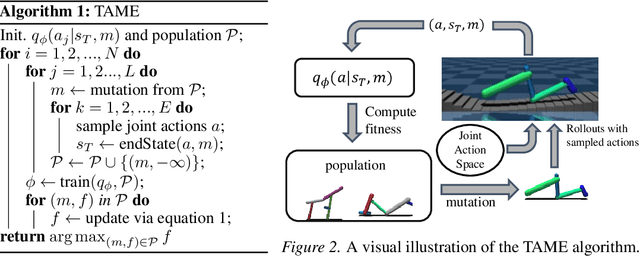

Deep reinforcement learning primarily focuses on learning behavior, usually overlooking the fact that an agent's function is largely determined by form. So, how should one go about finding a morphology fit for solving tasks in a given environment? Current approaches that co-adapt morphology and behavior use a specific task's reward as a signal for morphology optimization. However, this often requires expensive policy optimization and results in task-dependent morphologies that are not built to generalize. In this work, we propose a new approach, Task-Agnostic Morphology Evolution (TAME), to alleviate both of these issues. Without any task or reward specification, TAME evolves morphologies by only applying randomly sampled action primitives on a population of agents. This is accomplished using an information-theoretic objective that efficiently ranks agents by their ability to reach diverse states in the environment and the causality of their actions. Finally, we empirically demonstrate that across 2D, 3D, and manipulation environments TAME can evolve morphologies that match the multi-task performance of those learned with task supervised algorithms. Our code and videos can be found at https://sites.google.com/view/task-agnostic-evolution.
Hierarchically Decoupled Imitation for Morphological Transfer
Mar 03, 2020



Learning long-range behaviors on complex high-dimensional agents is a fundamental problem in robot learning. For such tasks, we argue that transferring learned information from a morphologically simpler agent can massively improve the sample efficiency of a more complex one. To this end, we propose a hierarchical decoupling of policies into two parts: an independently learned low-level policy and a transferable high-level policy. To remedy poor transfer performance due to mismatch in morphologies, we contribute two key ideas. First, we show that incentivizing a complex agent's low-level to imitate a simpler agent's low-level significantly improves zero-shot high-level transfer. Second, we show that KL-regularized training of the high level stabilizes learning and prevents mode-collapse. Finally, on a suite of publicly released navigation and manipulation environments, we demonstrate the applicability of hierarchical transfer on long-range tasks across morphologies. Our code and videos can be found at https://sites.google.com/berkeley.edu/morphology-transfer.