 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePIC-Net: Point Cloud and Image Collaboration Network for Large-Scale Place Recognition
Aug 03, 2020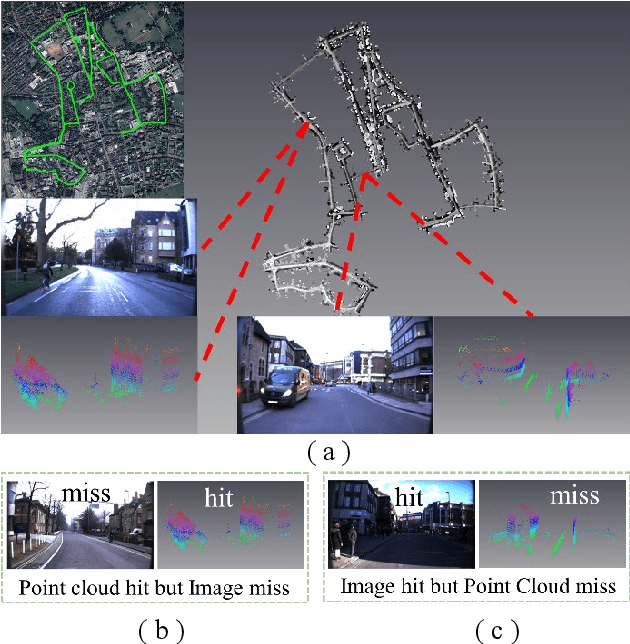
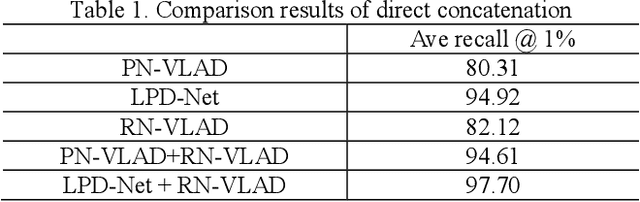
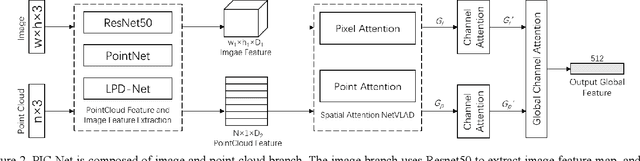
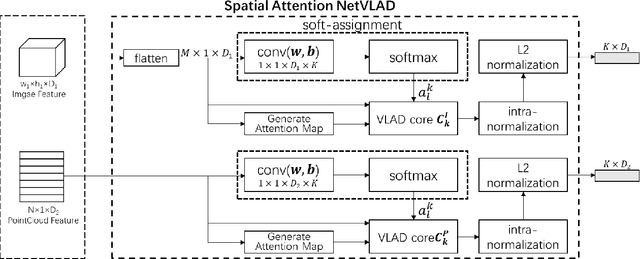
Place recognition is one of the hot research fields in automation technology and is still an open issue, Camera and Lidar are two mainstream sensors used in this task, Camera-based methods are easily affected by illumination and season changes, LIDAR cannot get the rich data as the image could , In this paper, we propose the PIC-Net (Point cloud and Image Collaboration Network), which use attention mechanism to fuse the features of image and point cloud, and mine the complementary information between the two. Furthermore, in order to improve the recognition performance at night, we transform the night image into the daytime style. Comparison results show that the collaboration of image and point cloud outperform both image-based and point cloud-based method, the attention strategy and day-night-transform could further improve the performance.