 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeSHFS: Neighborhood Search with Heuristic-based Feature Selection for Click-Through Rate Prediction
Sep 13, 2024

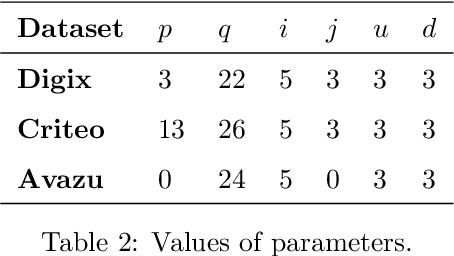

Click-through-rate (CTR) prediction plays an important role in online advertising and ad recommender systems. In the past decade, maximizing CTR has been the main focus of model development and solution creation. Therefore, researchers and practitioners have proposed various models and solutions to enhance the effectiveness of CTR prediction. Most of the existing literature focuses on capturing either implicit or explicit feature interactions. Although implicit interactions are successfully captured in some studies, explicit interactions present a challenge for achieving high CTR by extracting both low-order and high-order feature interactions. Unnecessary and irrelevant features may cause high computational time and low prediction performance. Furthermore, certain features may perform well with specific predictive models while underperforming with others. Also, feature distribution may fluctuate due to traffic variations. Most importantly, in live production environments, resources are limited, and the time for inference is just as crucial as training time. Because of all these reasons, feature selection is one of the most important factors in enhancing CTR prediction model performance. Simple filter-based feature selection algorithms do not perform well and they are not sufficient. An effective and efficient feature selection algorithm is needed to consistently filter the most useful features during live CTR prediction process. In this paper, we propose a heuristic algorithm named Neighborhood Search with Heuristic-based Feature Selection (NeSHFS) to enhance CTR prediction performance while reducing dimensionality and training time costs. We conduct comprehensive experiments on three public datasets to validate the efficiency and effectiveness of our proposed solution.
Object Detection and Tracking with Autonomous UAV
Jun 26, 2022



In this paper, a combat Unmanned Air Vehicle (UAV) is modeled in the simulation environment. The rotary wing UAV is successfully performed various tasks such as locking on the targets, tracking, and sharing the relevant data with surrounding vehicles. Different software technologies such as API communication, ground control station configuration, autonomous movement algorithms, computer vision, and deep learning are employed.
Lane Detection For Prototype Autonomous Vehicle
Dec 11, 2019



Unmanned vehicle technologies are an area of great interest in theory and practice today. These technologies have advanced considerably after the first applications have been implemented and cause a rapid change in human life. Autonomous vehicles are also a big part of these technologies. The most important action of a driver has to do is to follow the lanes on the way to the destination. By using image processing and artificial intelligence techniques, an autonomous vehicle can move successfully without a driver help. They can go from the initial point to the specified target by applying pre-defined rules. There are also rules for proper tracking of the lanes. Many accidents are caused due to insufficient follow-up of the lanes and non-compliance with these rules. The majority of these accidents also result in injury and death. In this paper, we present an autonomous vehicle prototype that follows lanes via image processing techniques, which are a major part of autonomous vehicle technology. Autonomous movement capability is provided by using some image processing algorithms such as canny edge detection, Sobel filter, etc. We implemented and tested these algorithms on the vehicle. The vehicle detected and followed the determined lanes. By that way, it went to the destination successfully.